- Kataloge
- ABB Robotics
- IRB 14000
IRB 14000
1 /132Seiten

IRB 14000
1 /132Seiten
Katalogauszüge

Trace back information: Workspace 23A version a15 Checked in 2023-03-22 Skribenta version 5.5.019
Katalog auf Seite 2 öffnen
Produktspezifikation IRB 14000 Dokumentnr: 3HAC052982-003 Revision: S © Copyright 2015-2023 ABB. Alle Rechte vorbehalten. Spezifikationen können ohne vorherige Ankündigung geändert werden
Katalog auf Seite 3 öffnen
Die Informationen in diesem Handbuch können ohne vorherige Ankündigung geändert werden und stellen keine Verpflichtung von ABB dar. ABB übernimmt keinerlei Verantwortung für etwaige Fehler, die dieses Handbuch enthalten kann. Wenn nicht ausdrücklich in vorliegendem Handbuch angegeben, gibt ABB für keine hierin enthaltenen Informationen Sachmängelhaftung oder Gewährleistung für Verluste, Personen- oder Sachschäden, Verwendbarkeit für einen bestimmten Zweck oder Ähnliches. In keinem Fall kann ABB haftbar gemacht werden für Schäden oder Folgeschäden, die sich aus der Anwendung dieses Dokuments oder...
Katalog auf Seite 4 öffnen
3HAC052982-003 Revision: S © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 5 öffnen
4 Spezifikation der Varianten und Optionen 119 © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 6 öffnen
Überblick über diese Spezifikation Überblick über diese Spezifikation Über diese Produktspezifikation Sie ist eine Leistungsbeschreibung des Manipulators oder einer ganzen Serie von Manipulatoren in Bezug auf: • Die Struktur und Dimensionsdarstellungen • Einhaltung von Normen, Sicherheits- und Betriebsbestimmungen • Die Lastdiagramme, Montage von Zusatzausrüstung, die Bewegung und die Roboterreichweite • Spezifikation verfügbarer Varianten und Optionen Die Produktspezifikation enthält auch Informationen für die Steuerung. Verwendung Produktspezifikationen dienen dazu, Daten und Leistungsinformationen...
Katalog auf Seite 7 öffnen
© Copyright 2015-2023 ABB. Alle Rechte vor
Katalog auf Seite 9 öffnen
Diese Seite wurde absichtlich leer gelassen
Katalog auf Seite 10 öffnen
Allgemeines Der IRB 14000 ist aus der ersten Generation der zweiarmigen Industrieroboter von ABB Robotics, mit 7-Achsen an jedem Arm. Er wurde speziell für die Zweige der Fertigungsindustrie entwickelt, in denen flexible, roboterbasierte Automatisierung eingesetzt wird (z. B. 3C-Industrie). Der Roboter verfügt über eine offene Struktur, die speziell für eine flexible Verwendung ausgelegt wurde. Darüber hinaus verfügt er über umfangreiche Kommunikationsmöglichkeiten mit externen Systemen. Fortsetzung auf nächster Seite Produktspezifikation - IRB 14000 11 © Copyright 2015-2023 ABB. Alle Rechte...
Katalog auf Seite 11 öffnen
1.1.1.1 Roboterbeschreibung 1.1.1.1.1 Robotertypbeschreibung Type A von IRB 14000 Der Unterschied zwischen IRB 14000 und IRB 14000 Type A ist, dass der Type A am Arm eine verstärkte Bauweise aufweist. Deshalb unterscheiden sich die folgenden Teile zwischen den Typen: • Motorbremse, Achse 1 und Achse 2 Getriebe, Achse 4 und Achse 5 Mechanische Konstruktion, Achse 4 und Achse 5 Diese Roboter in Originalweise werden einfach IRB 14000 genannt (kein Typ angegeben). Ermitteln des Robotertyps? Die folgenden Merkmale können für die Ermittlung des Robotertyps genutzt werden: Achse 5 Aussehen IRB 14000...
Katalog auf Seite 12 öffnen
© Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 13 öffnen
Armkonfiguration während der Systeminstallation Der Robotertyp muss für die Einstellung der Armkonfiguration während der Systeminstallation richtig ausgewählt werden, sonst treten ggf. unerwartete Bewegungsfehler oder Leistungsprobleme auf. Type A ist für die Auswahl wie unten erläutert nur verfügbar in RobotStudio 2019.5.3 oder später und in RobotWare 6.10.2 oder später. a IRB 14000 (Dual arm YuMi) 4 0 IRB 14000-0.5/0.5 a Left Arm configuration □ IRB 14000-0.5/0.5 0 IR8 14000-0.5/0.5 Type A ■* Right Arm configuration □ IRB 14000-0.5/0.5 0 IRB -4000;0.5/0.5 Type Aj xx2000002171 Clean Room Klassifizierung...
Katalog auf Seite 14 öffnen
Bei Betrieb im Rahmen der angegebenen Testbedingungen eignet sich der IRB 14000 YuMi inklusive Greifer und Saugnapf zur Verwendung in Reinräumen, welche die Spezifikationen der folgenden Luftreinheitsklassen nach ISO 14644-1 erfüllen. Der Roboter besitzt die Schutzklasse IP30. Betriebssystem Der Roboter ist mit der Steuerung (im Inneren des Roboters) und der Robotersteuerungssoftware RobotWare ausgestattet. RobotWare unterstützt sämtliche Aspekte des Robotersystems, wie beispielsweise die Bewegungssteuerung, die Entwicklung und Abarbeitung von Anwendungsprogrammen, den Datenaustausch, usw., siehe...
Katalog auf Seite 15 öffnen
1 Beschreibung 1.1.1.1.1 Robotertypbeschreibung Fortsetzung Produktspezifikation - IRB 14000 3HAC052982-003 Revision: S © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 16 öffnen
Der IRB 14000 kann nur an einem Tisch oder an einer anderen ebenen Oberfläche angebracht werden. Andere Montagepositionen sind nicht zulässig. Fortsetzung auf nächster Seite Produktspezifikation - IRB 14000 17 © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 17 öffnen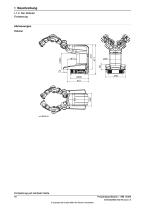
Fortsetzung auf nächster Seite 18 Produktspezifikation - IRB 14000 © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 18 öffnen
© Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 19 öffnen
Die aufgeführten Normen gelten zum Zeitpunkt der Veröffentlichung dieses Dokuments. Normen, die ungültig geworden sind oder ersetzt wurden, werden bei Bedarf aus der Liste entfernt. Allgemeines Dieses Erzeugnis erfüllt die Anforderungen der ISO 10218-1:2011, Robots for industrial environments - Safety requirements -Part 1 Robots, und den anwendbaren Teilen der normativen Referenz, mit Gültigkeit ab ISO 10218-1:2011. Eventuelle Abweichungen von ISO 10218-1 2011 sind in der Einbauerklärung enthalten, die der Lieferung des Erzeugnisses beiliegt. Fortsetzung auf nächster Seite © Copyright 2015-2023...
Katalog auf Seite 20 öffnen
1.2.1 Geltende Normen Fortsetzung © Copyright 2015-2023 ABB. Alle Rechte v
Katalog auf Seite 21 öffnen
1.2.1 Geltende Normen Fortsetzung Norm i Gilt nur für Roboter zum Lichtbogenschweißen. Ersetzt IEC 61000-6-4 für Roboter zum Lichtbogenschweißen. ii Nur Roboter mit Schutzart Clean Room. © Copyright 2015-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 22 öffnenAlle Kataloge und technischen Broschüren von ABB Robotics
 IRB 6700
IRB 67004 Seiten
 IRB 4600
IRB 4600466 Seiten
 IRB 4600
IRB 460092 Seiten
 IRB 910INV
IRB 910INV90 Seiten
 IRB 2400
IRB 240062 Seiten
 IRB 1600/1660
IRB 1600/166090 Seiten
 IRB 1200
IRB 12002 Seiten
 AMR P304
AMR P3042 Seiten
 IRB 460
IRB 4602 Seiten
 IRB 1410 Industrial Robot
IRB 1410 Industrial Robot48 Seiten
 MU series
MU series2 Seiten
 IRB 5500-22/23
IRB 5500-22/234 Seiten
 IRB 52
IRB 522 Seiten
 IRB 910SC series
IRB 910SC series58 Seiten
 Collaborative robotics portfolio
Collaborative robotics portfolio8 Seiten
 IRB910SC
IRB910SC56 Seiten
 A customer magazine from ABB Robotic
A customer magazine from ABB Robotic24 Seiten
 Robotics product range
Robotics product range35 Seiten
 Press Automation Solutions
Press Automation Solutions28 Seiten
 IRBT 4004/6004/7004
IRBT 4004/6004/70042 Seiten
 IRB 1100
IRB 110020 Seiten
 ABB create
ABB create24 Seiten
 LIVING LEVELS
LIVING LEVELS44 Seiten
 IRC5 Industrial Robot Controller
IRC5 Industrial Robot Controller4 Seiten
 IRB 6660 - Industrial Robot
IRB 6660 - Industrial Robot4 Seiten
 IRB 120 industrial robot
IRB 120 industrial robot2 Seiten
 Function Package IRB 4400
Function Package IRB 44002 Seiten
 PalletPack 460
PalletPack 4602 Seiten
 Atomizer Upgrades
Atomizer Upgrades2 Seiten
 RacerPack
RacerPack13 Seiten
 RB 910SC SCARA Overview
RB 910SC SCARA Overview38 Seiten
 IRB 6660FX
IRB 6660FX2 Seiten
 IRB 1660ID
IRB 1660ID17 Seiten
 A50-0406-1660
A50-0406-1660149 Seiten
 IRB 1660ID
IRB 1660ID2 Seiten
 IRBP L Workpiece positioner
IRBP L Workpiece positioner2 Seiten
 FlexTrack IRT 501
FlexTrack IRT 5012 Seiten
 IRBT X004 Track Motion
IRBT X004 Track Motion2 Seiten
 ROB0245EN RacerPack
ROB0245EN RacerPack2 Seiten
 IntegratedFC_ROB0243EN
IntegratedFC_ROB0243EN2 Seiten
 IRL 600 Flexlifter 600
IRL 600 Flexlifter 6002 Seiten
 FlexLifter IRL100 IRL190
FlexLifter IRL100 IRL1902 Seiten
 FlexGun
FlexGun2 Seiten
 RobotStudio Cutting PowerPac
RobotStudio Cutting PowerPac2 Seiten
 Laser Cutting Software
Laser Cutting Software4 Seiten
 TSC
TSC2 Seiten
 7th axis
7th axis2 Seiten
 2K Mixer
2K Mixer2 Seiten
 FlexPLP IRPLP
FlexPLP IRPLP2 Seiten
 IRB 8700
IRB 87002 Seiten
 YuMi®
YuMi®4 Seiten
 IRBP i-L/ i-T/ i-A
IRBP i-L/ i-T/ i-A2 Seiten
 IRBT 15_16_26
IRBT 15_16_262 Seiten
 ABB Laser Cutsheet_IRBP K
ABB Laser Cutsheet_IRBP K2 Seiten
 ABB Laser Cutsheet_IRBP R
ABB Laser Cutsheet_IRBP R2 Seiten
 RobotWare Cutting
RobotWare Cutting2 Seiten
 IRB 7600 - the Power Robot
IRB 7600 - the Power Robot20 Seiten
 Less is more - FlexPainter IRB 5500
Less is more - FlexPainter IRB 550012 Seiten
 IRB 1520ID The Lean Arc Welder
IRB 1520ID The Lean Arc Welder2 Seiten
 IRB 140 Industrial Robot
IRB 140 Industrial Robot2 Seiten















- Elektromotor
- Schweißsystem
- AC-Motor
- Automatisierungssoftware
- Asynchronmotor
- Automatischer Schweißautomat
- Prozess-Software
- Software für Architektur
- Hubtisch
- ABB Knickarmroboter
- Kalibriersystem
- Steuerungssoftware
- Scherenhubtisch
- ABB 6-Achs-Roboter
- ABB bodenstehender Roboter
- Beschicker
- ABB Umschlag-Roboter
- 3D-Software
- Messsoftware