- Kataloge
- ABB Robotics
- IRB 910INV
IRB 910INV
1 /90Seiten

IRB 910INV
1 /90Seiten
Katalogauszüge

Trace back information: Workspace 23C version a7 Checked in 2023-09-21 Skribenta version 5.5.019
Katalog auf Seite 2 öffnen
Produktspezifikation IRB 910INV-3/0.35 IRB 910INV-6/0.55 OmniCore Dokumentnr: 3HAC068057-003 Revision: M © Copyright 2019-2023 ABB. Alle Rechte vorbehalten. Spezifikationen können ohne vorherige Ankündigung geändert werden.
Katalog auf Seite 3 öffnen
Die Informationen in diesem Handbuch können ohne vorherige Ankündigung geändert werden und stellen keine Verpflichtung von ABB dar. ABB übernimmt keinerlei Verantwortung für etwaige Fehler, die dieses Handbuch enthalten kann. Wenn nicht ausdrücklich in vorliegendem Handbuch angegeben, gibt ABB für keine hierin enthaltenen Informationen Sachmängelhaftung oder Gewährleistung für Verluste, Personen- oder Sachschäden, Verwendbarkeit für einen bestimmten Zweck oder Ähnliches. In keinem Fall kann ABB haftbar gemacht werden für Schäden oder Folgeschäden, die sich aus der Anwendung dieses Dokuments oder...
Katalog auf Seite 4 öffnen
2 Spezifikation der Varianten und Optionen 77 3HAC068057-003 Revision: M © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 5 öffnen
Diese Seite wurde absichtlich leer gelassen
Katalog auf Seite 6 öffnen
Überblick über dieses Handbuch Überblick über dieses Handbuch Über diese Produktspezifikation Diese Produktspezifikation beschreibt die Leistung eines Manipulators oder einer ganzen Serie von Manipulatoren in Bezug auf: • Die Struktur und Dimensionsdarstellungen • Die Einhaltung von Normen, Sicherheits- und Betriebsbestimmungen • Die Lastdiagramme, Montage von Zusatzausrüstung, die Bewegung und die Roboterreichweite • Die Angabe der verfügbaren Varianten und Optionen Die Spezifikation betrifft den Manipulator der die OmniCore-Steuerung verwendet. Verwendung Produktspezifikationen dienen dazu,...
Katalog auf Seite 7 öffnen
© Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 8 öffnen
Allgemeines Der IRB 910INV ist ein SCARA-Roboter der zweiten Generation von ABB Robotics mit vier Achsen und einer maximalen Nutzlast von 3 kg and 6 kg in den beiden Reichweiten-Varianten 0,35 m und 0,55 m. Dieser Roboter ist spezifisch für Fertigungsindustrien mit flexibler, roboterbasierter Automatisierung entwickelt (z. B. 3C-Industrie). Der Roboter verfügt über eine offene Struktur, die speziell für eine flexible Verwendung ausgelegt wurde. Darüber hinaus verfügt er über umfangreiche Kommunikationsmöglichkeiten mit externen Systemen. Fraunhofer T E S T E D® DEVICE ABB Engineering (Siiangnai)...
Katalog auf Seite 9 öffnen
1 Beschreibung 1.1.1 Einführung in die Struktur Fortsetzung Informationen zur AMC (Airborne Molecular Contamination)-Klassifizierung siehe unten: Klassifizierungsergebnisse gemäß ISO 14644-8 bei verschiedenen Testtemperaturen. IP54 Schutz Bei dem Roboter ist IP54 als Option vorhanden. Die Option fügt Abdichtung, Bearbeitung von Teilen und Dichtung hinzu. Betriebssystem Der Roboter ist mit der OmniCore C30/C90/E10 -Steuerung und der RobotWare-Steuersoftware ausgestattet. RobotWare unterstützt sämtliche Aspekte des Robotersystems, wie beispielsweise die Bewegungssteuerung, die Entwicklung und die...
Katalog auf Seite 10 öffnen
1 Beschreibung 1.1.1 Einführung in die Struktur Fortsetzung © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 11 öffnen
Der IRB 910INV ist in zwei Versionen verfügbar und kann nur an der Decke montiert werden; andere Montagepositionen sind nicht zulässig. Fortsetzung auf nächster Seite 12 Produktspezifikation - IRB 910INV © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 12 öffnen
Gewicht, Roboter Die Tabelle gibt das Gewicht des Roboters an. i A tilt of up to 3° does not affect the payload or reach, but it can have a negative impact on performance and lifetime. The actual value must be set in the system parameters. Der tatsächliche Montagewinkel muss immer in den Systemparametern konfiguriert werden, da sonst Leistung und Lebensdauer beeinträchtigt werden. Einzelheiten finden Sie im Produkthandbuch. Belastung des Fundaments, Roboter Die Abbildung zeigt die Richtungen der Belastungskräfte der Roboter an. Die Richtungen gelten für alle invertierten Roboter. Fortsetzung...
Katalog auf Seite 13 öffnen
1.1.2.1 Technische Daten Fortsetzung © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 14 öffnen
i Bei einer niedrigen Umgebungstemperatur von < 10 °C wird, wie bei jeder anderen Maschine auch, für den Roboter eine Warmlaufphase empfohlen. Andernfalls besteht die Gefahr, dass der Roboter aufgrund der temperaturbedingten Viskosität von Öl und Schmierfett stehen bleibt oder mit geringerer Leistung läuft. © Copyright 2019-2023 ABB. Alle Rechte vorbehal
Katalog auf Seite 15 öffnen
1.1.2.1 Technische Daten Fortsetzung Schutzklassen, Roboter Die Tabelle gibt die erhältlichen Schutzarten des Roboters mit den entsprechenden Schutzklassen an. © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 16 öffnen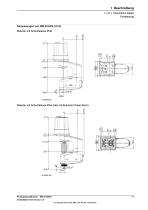
1 Beschreibung 1.1.2.1 Technische Daten Fortsetzung Roboter mit Schutzklasse IP54 oder mit Schutzart Clean Room. 3HAC068057-003 Revision: M © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 17 öffnen
1 Beschreibung 1.1.2.1 Technische Daten Fortsetzung Roboter mit Schutzklasse IP54 oder mit Schutzart Clean Room. Die Abbildung zeigt die Abmessungen des IRB 910INV-6/0.55 for Clean Room/IP54. Produktspezifikation - IRB 910INV 3HAC068057-003 Revision: M © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 18 öffnen
Allgemeines Dieses Produkt erfüllt die Anforderungen der IS0 10218-1:2011, Robots for industrial environments - Safety requirements - Part 1 Robots, und der anwendbaren Teile der normativen Referenz, mit Gültigkeit ab ISO 10218-1:2011. Eventuelle Abweichungen von ISO 10218-1 2011 sind in der Einbauerklärung enthalten, die der Lieferung des Erzeugnisses beiliegt. Die Erklärung ist im Lieferumfang enthalten. © Copyright 2019-2023 ABB. Alle Rechte vorbehalten.
Katalog auf Seite 19 öffnen
1 Beschreibung 1.3.1 Einführung in die Installation 1.3 Installation 1.3.1 Einführung in die Installation Allgemeines IRB 910INV ist in zwei Ausführungen erhältlich. Alle Ausführung können nur hängend montiert werden. Je nach Roboterversion kann ein Endeffektor mit einem Maximalgewicht von 3 kg oder 6 kg, einschließlich Nutzlast am unteren Ende der Kugelrollspindel mit Kerbverzahnung (Achse 4) montiert werden. Siehe Lastdiagramm auf Seite 25. Produktspezifikation - IRB 910INV 3HAC068057-003 Revision: M © Copyright 2019-2023 ABB. Alle Rechte vorbeh
Katalog auf Seite 20 öffnenAlle Kataloge und technischen Broschüren von ABB Robotics
 IRB 6700
IRB 67004 Seiten
 IRB 4600
IRB 4600466 Seiten
 IRB 4600
IRB 460092 Seiten
 IRB 14000
IRB 14000132 Seiten
 IRB 2400
IRB 240062 Seiten
 IRB 1600/1660
IRB 1600/166090 Seiten
 IRB 1200
IRB 12002 Seiten
 AMR P304
AMR P3042 Seiten
 IRB 460
IRB 4602 Seiten
 IRB 1410 Industrial Robot
IRB 1410 Industrial Robot48 Seiten
 MU series
MU series2 Seiten
 IRB 5500-22/23
IRB 5500-22/234 Seiten
 IRB 52
IRB 522 Seiten
 IRB 910SC series
IRB 910SC series58 Seiten
 Collaborative robotics portfolio
Collaborative robotics portfolio8 Seiten
 IRB910SC
IRB910SC56 Seiten
 A customer magazine from ABB Robotic
A customer magazine from ABB Robotic24 Seiten
 Robotics product range
Robotics product range35 Seiten
 Press Automation Solutions
Press Automation Solutions28 Seiten
 IRBT 4004/6004/7004
IRBT 4004/6004/70042 Seiten
 IRB 1100
IRB 110020 Seiten
 ABB create
ABB create24 Seiten
 LIVING LEVELS
LIVING LEVELS44 Seiten
 IRC5 Industrial Robot Controller
IRC5 Industrial Robot Controller4 Seiten
 IRB 6660 - Industrial Robot
IRB 6660 - Industrial Robot4 Seiten
 IRB 120 industrial robot
IRB 120 industrial robot2 Seiten
 Function Package IRB 4400
Function Package IRB 44002 Seiten
 PalletPack 460
PalletPack 4602 Seiten
 Atomizer Upgrades
Atomizer Upgrades2 Seiten
 RacerPack
RacerPack13 Seiten
 RB 910SC SCARA Overview
RB 910SC SCARA Overview38 Seiten
 IRB 6660FX
IRB 6660FX2 Seiten
 IRB 1660ID
IRB 1660ID17 Seiten
 A50-0406-1660
A50-0406-1660149 Seiten
 IRB 1660ID
IRB 1660ID2 Seiten
 IRBP L Workpiece positioner
IRBP L Workpiece positioner2 Seiten
 FlexTrack IRT 501
FlexTrack IRT 5012 Seiten
 IRBT X004 Track Motion
IRBT X004 Track Motion2 Seiten
 ROB0245EN RacerPack
ROB0245EN RacerPack2 Seiten
 IntegratedFC_ROB0243EN
IntegratedFC_ROB0243EN2 Seiten
 IRL 600 Flexlifter 600
IRL 600 Flexlifter 6002 Seiten
 FlexLifter IRL100 IRL190
FlexLifter IRL100 IRL1902 Seiten
 FlexGun
FlexGun2 Seiten
 RobotStudio Cutting PowerPac
RobotStudio Cutting PowerPac2 Seiten
 Laser Cutting Software
Laser Cutting Software4 Seiten
 TSC
TSC2 Seiten
 7th axis
7th axis2 Seiten
 2K Mixer
2K Mixer2 Seiten
 FlexPLP IRPLP
FlexPLP IRPLP2 Seiten
 IRB 8700
IRB 87002 Seiten
 YuMi®
YuMi®4 Seiten
 IRBP i-L/ i-T/ i-A
IRBP i-L/ i-T/ i-A2 Seiten
 IRBT 15_16_26
IRBT 15_16_262 Seiten
 ABB Laser Cutsheet_IRBP K
ABB Laser Cutsheet_IRBP K2 Seiten
 ABB Laser Cutsheet_IRBP R
ABB Laser Cutsheet_IRBP R2 Seiten
 RobotWare Cutting
RobotWare Cutting2 Seiten
 IRB 7600 - the Power Robot
IRB 7600 - the Power Robot20 Seiten
 Less is more - FlexPainter IRB 5500
Less is more - FlexPainter IRB 550012 Seiten
 IRB 1520ID The Lean Arc Welder
IRB 1520ID The Lean Arc Welder2 Seiten
 IRB 140 Industrial Robot
IRB 140 Industrial Robot2 Seiten















- Elektromotor
- Schweißsystem
- ABB Industrieroboter
- AC-Motor
- Automatisierungssoftware
- Asynchronmotor
- Automatischer Schweißautomat
- Prozess-Software
- Software für Architektur
- Hubtisch
- ABB Knickarmroboter
- Kalibriersystem
- Steuerungssoftware
- Scherenhubtisch
- ABB 6-Achs-Roboter
- ABB bodenstehender Roboter
- Beschicker
- ABB Umschlag-Roboter
- 3D-Software
- Messsoftware