HXP100-ELECV6
1 /2Seiten

HXP100-ELECV6
1 /2Seiten
Katalogauszüge

MOTORISCHE LINEARTISCHE Motorische Positionierung 6 Achsen Positioniersystem Parallelkinematik KUNDENSPEZIFISCHE MOTORISCHE SYSTEME MOTORISCHE OPTIKHALTER MOTORISCHE VERTIKALTISCHE MOTORISCHE ANTRIEBE MOTORISCHE ROTATIONSTISCHE • Kompakter 6 Achsen Positionierer • Leicht und dennoch mit hoher Steifigkeit (besonders in Z Richtung) • Keine beweglichen Kabel • Virtuelle Drehpunkte per Software eintellbar Ein Hexapod ist eine parallelkinematische Bewegungseinheit, die sechs Freiheitsgrade beseitzt: X, Y, Z, JX, JY, JZ. Hexapoden sind weit verbreitet und effektiv bei komplexen Bewegungen, die hohe Lasten und eine genaue Positionierung in sechs unabhängigen Achsen erfordern. Jedoch haben sie den Ruf sehr komplex und kostspielig zu sein. Newport ist das erste Unternehmen, das einen Hexapod vorstellt, der nicht nur ein ausgezeichnetes Preis-Leistungs-Verhältnis, sondern auch noch eine sehr einfache Nutzbarkeit besitzt. Der Newport Hexapod wird von sechs verbesserten Ausführungen der Industrie erprobten LTA Antriebe mit hochleistungsfähigen DC-Servo Motoren betrieben. Die Qualität der Antriebe hat bekannter Weise einen großen Einfluss auf die Gesamtleistung eines Hexapoden, genauso wie die Gelenke, die die Antriebe mit der Grundplatte und der Deckplatte verbinden. Diese Herausforderung haben unsere Entwicklungsingenieure gemeistert und haben eine einzigartige Konstruktion von speziellen Anti-Haft beschichteten Kugellagern entworfen, die zudem eine merklich höhere Steifigkeit als gewöhnliche Kugellager bieten. Das Ergebnis ist der Newport Hexapod, der eine mehr als fünfmal höhere Steifigkeit und doppelte Belastbarkeit als Hexapoden vergleichbarer Größe bietet. Der Newport Hexapod wird von einer speziellen HXP100-ELEC Motorsteuerung. Mit dieser Steuerung wird die akkurate Umsetzung der eingegebenen kartesischen Koordinaten in die Bewegung der Beine des Hexapoden gewährleistet. Des Weiteren bietet die HXP100ELEC Steuerung verschiedene entwickelte Eigenschaften, wie steuerbare E/As, auf Hardware bezogene Trigger, Ereignis Trigger, hochgeschwindigkeits- "data acquistion" während der Bewegung, schnelle TCP/IP Kommunikation und eine integrierte TCL Programmierbarkeit. All diese Ausstattungen, erleichtern die Benutzerfreundlichkeit. Anwendungen • Testen von Optiken und Anordnungen mit Auslegern • Astronomie • Biotechnologie, Medizinische Laboranwendungen • Röntgenbeugung • Mikrobearbeitung Als Standmerkmal erlaubt die Hexapod XPS Steuerung den virtuellen Drehpunkt frei zu wählen. Eine übliche Anforderung an viele Hexapodanwendungen ist die Möglichkeit eines virtuellen Pivot Punktes, der es dem Benutzer erlaubt seinen Drehpunkt frei zu wählen. Für die XPS-Steuerung des Hexapoden ist das ein Standardmerkmal, was jedoch von Newport weiter entwickelt wurde. Der Newport Hexapod kann den Pivot Punkt nicht nur verschieben, sondern das ganze Koordinatensystem neu Positionieren. Zusätzlich sind zwei Koordinatensysteme angeboten: das Werkzeugkoordinatensystem (Bewegt sich mit dem Hexapod) und das Weltkoordinatensystem (festes Koordinatensystem). Inkrementelle Verschiebung eines der Systeme in benutzerfreundlichen kartesischen Koordinaten, sowie die einfache Umrechnung von das eine in das andere Koordinatesystem ist durch einen Funktionsaufruf möglich. Mit dieser leistungsstarken Funktion sind jegliche Bewegungsabläufe des Hexapoden möglich, ohne die Koordinate extra umzurechnen. Der HXP100 ist auch in einer vakuumtauglichen Version erhältlich. Kontaktieren Sie unser Newport Entwicklungsteam für weitere Konfigurationsmöglichkeiten wie längere Verfahrwege, höhere Geschwindigkeiten oder größer Lasten.
Katalog auf Seite 1 öffnen
Motorische Positionierung TOOL WORK CARRIAGE MOTORISCHE LINEARTISCHE Technische Daten BASE WORLD MOTORISCHE ROTATIONSTISCHE Kleinste Schrittweite (qx, qy, qz) ( mrad) Absolute Bewegungen und Koordinaten sind im Weltkoordinatensystem definiert. Inkrementale Bewegungen können sowohl im Welt-, als auch im Werkzeugkoordinatensystem durchgeführt werden. Verfahrwege hängen voneinander ab. Die angegebenen Längen sind maximale Verfahrwege für je eine Achse, wenn alle anderen Achsen in ihrer zentralen Position sind (Höhe = 208 mm für Z). 2 6-Achs Bewegung. MOTORISCHE ANTRIEBE Bestell-Information Beschreibung...
Katalog auf Seite 2 öffnenAlle Kataloge und technischen Broschüren von Bookham
 INT1-36-6-A
INT1-36-6-A2 Seiten
 15RP52-2
15RP52-22 Seiten
 R-30602
R-306022 Seiten
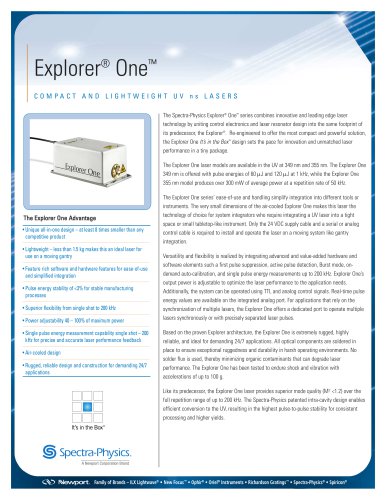 Explorer One Compact
Explorer One Compact3 Seiten
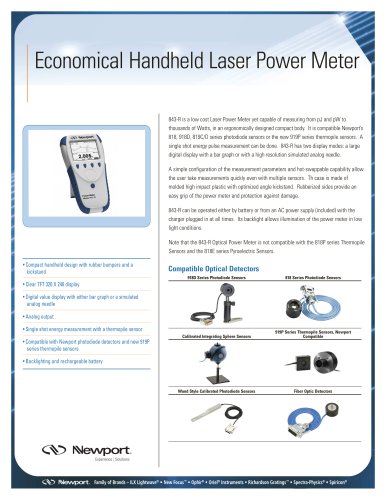 843-R
843-R2 Seiten
 919P-003-10
919P-003-102 Seiten


Archivierte Kataloge
 Closed-loop Actuators
Closed-loop Actuators6 Seiten
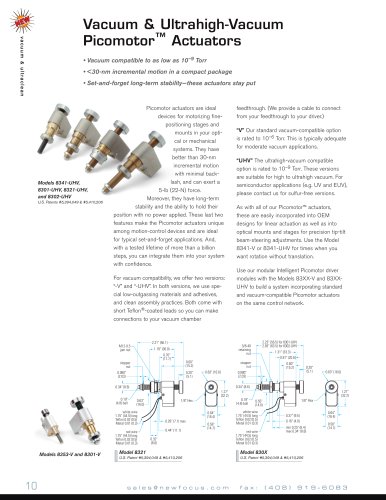
 Picomotor™ Actuators
Picomotor™ Actuators6 Seiten
 Beam-Position Photoreceivers
Beam-Position Photoreceivers6 Seiten
 Power Sensors
Power Sensors4 Seiten
 Balanced Receivers
Balanced Receivers8 Seiten
 High-Speed Detectors and Receivers
High-Speed Detectors and Receivers18 Seiten
 Amplitude Modulators
Amplitude Modulators2 Seiten
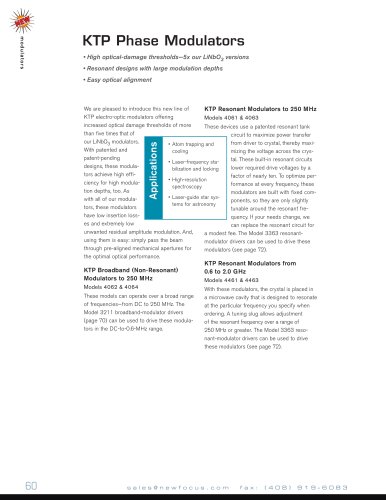 Phase Modulators
Phase Modulators6 Seiten
 Optical Choppers
Optical Choppers2 Seiten
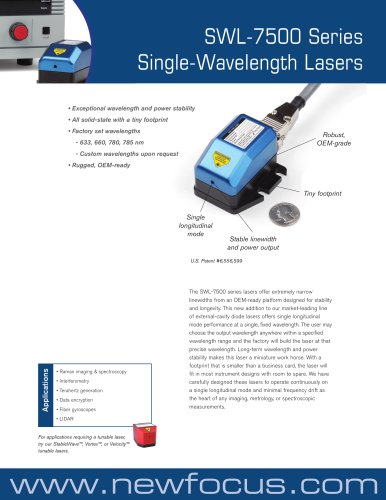 Single-Wavelength Lasers
Single-Wavelength Lasers4 Seiten
 Multipurpose
Multipurpose6 Seiten
 Swept Wavelength
Swept Wavelength4 Seiten
 OEM Tunable Laser Modules
OEM Tunable Laser Modules2 Seiten






- LIMING Positioniertisch
- Motorisierter Positioniertisch
- LIMING 1-Achs-Positioniertisch
- Festkörperlaser
- LIMING drehbarer Positioniertisch
- VIS-Laser
- Laser mit kontinuierlicher Welle
- Kontinuierlicher Laser
- LIMING konvexe Linse
- OEM-Laser
- Lasermodul
- Siliziumlinse
- Monomode-Laser
- Piezoaktor
- Linearer Piezoaktor
- Diodenlaser
- Monochromatischer Laser
- Achromatische Linse
- Festkörper-Lasermodul
- Modulator