Gruppe: FAULHABER

Katalogauszüge

FAULHABER Tutorial Schrittverluste verhindern bei Schrittmotoren
Katalog auf Seite 1 öffnen
Schrittverluste verhindern bei Schrittmotoren Der Einsatz von Schrittmotoren ist eine ausgezeichnete Entscheidung. Allerdings stellen dabei Schrittverluste ein Problem dar. In den meisten Fällen können Schrittverluste vermieden oder korrigiert werden. Schrittmotoren werden im offenen Regelkreis betrieben. Wenn ein Schrittmotor in bestimmten Situationen nicht ordnungsgemäß arbeitet, geht man davon aus, dass entweder der Motor oder die Steuerelektronik defekt ist. Die sorgfältige Auswahl von Motor und Controller ist ausschlaggebend. Allerdings tragen auch andere Faktoren zu Schrittverlusten...
Katalog auf Seite 2 öffnen
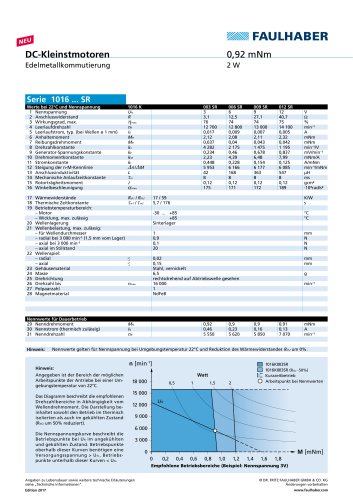
A. Auswahl des Schrittmotors Zuerst muss der richtige Motor für die jeweilige Anwen- Als Nächstes sollte der Motor praktischen Tests unter dung gefunden werden. Für ein optimales Ergebnis zogen werden, um zu prüfen, ob im Betrieb Schritt- sollten Sie dabei folgende grundlegende theoretische verluste auftreten. Konstruktionsbedingt kann ein Regeln befolgen: Schrittmotor nicht nur einen einzigen Schritt verlieren. Bei geringen Drehzahlen verliert er ein Vielfaches von 1. Legen Sie bei der Motorauswahl denjenigen 4 Schritten (8, 12, 16 … Schritte) und bei hohen Dreh- Betriebspunkt zugrunde, an...
Katalog auf Seite 3 öffnen
B. Betriebsart Je nach Bewegungsprofil muss man unterschiedliche Schlüsse ziehen B1. Start-Stopp Betrieb Abb1. Start-Stopp Frequenz In dieser Betriebsart ist der Motor fest mit der Last verbunden und wird mit konstanter Drehzahl betrieben. Der Motor muss die Last (Trägheit und Reibung) innerhalb des ersten Schritts auf die vorgegebene Frequenz beschleunigen. Fehlerbild: Motor läuft nicht an Ursachen Falscher Motor, größeren Motor wählen Pendelt der Motor von Links nach Rechts, könnte eine Phase unterbrochen oder nicht angeschlossen sein Phasenstrom passt nicht Phasenstrom erhöhen, zumindest...
Katalog auf Seite 4 öffnen
Fehlerbild: Motor beendet die Beschleunigungsrampe nicht. Ursachen Motor bleibt bei Resonanzfrequenz hängen eschleunigung erhöhen, um die Resonanzfrequenz schneller B zu durchlaufen Start-Stopp Frequenz über dem Resonanzpunkt wählen Halbschritt- oder Mikroschrittbetrieb verwenden M echanische Dämpfung vorsehen, z.B. in Form einer Trägheitsscheibe am hinteren Wellenende. Falsche Einstellung von Versorgungsspannung oder -strom (zu gering) S pannung oder Strom erhöhen (kurzzeitige Verwendung höherer Werte ist zulässig) M otor mit geringerer Impedanz testen S tromregelung verwenden (falls...
Katalog auf Seite 5 öffnen
C. Externe Kommutierungsfehler Wie bereits erwähnt, verliert der Motor konstruktions Phase 1 bedingt ein Vielfaches von 4 Schritten (8, 12, 16 … Schritte). der Synchronität. Der Motor bleibt stehen. Beträgt die 4-Bit Wort angesteuert werden. ohne zusätzliches Steuerelement direkt mit einem Die Typ der dargestellten Treiberschaltung kann geliefert wird. tierungsfolge untersuchen, die von der Elektronik ist der Motor in Ordnung und man sollte die Kommu Anzahl verlorener Schritte kein Vielfaches von 4 Schritten, Bei hoher Drehzahl führen Schrittverluste zum Verlust Die Kommutierung läuft nach...
Katalog auf Seite 6 öffnen
D. Externe Ereignisse D1. Lastrückkopplung D2. Erhöhung der Nutzlast im Laufe der Zeit Manchmal wird der vom Motor angetriebene Mechanismus/Last während der Bewegung „aufgezogen“ und Manchmal läuft der Motor für eine lange Zeit störungs- gibt diese Energie wieder an den Motor zurück, wenn frei und viel später treten die ersten Schrittverluste auf. die Ströme ausgeschaltet werden. Der Mechanismus In diesem Fall ist es sehr wahrscheinlich, dass die Last, könnte z.B. ein Untersetzungsgetriebe sein. die der Motor „sieht“, sich geändert hat. Das kann auf Verschleiß der Motorlager oder ein...
Katalog auf Seite 7 öffnenAlle Kataloge und technischen Broschüren von FAULHABER Drive Systems
-
 Serie 1228 ... SXR
Serie 1228 ... SXR2 Seiten
-
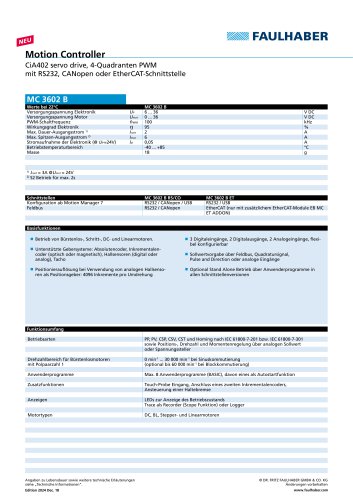 MC 3602 B
MC 3602 B2 Seiten
-
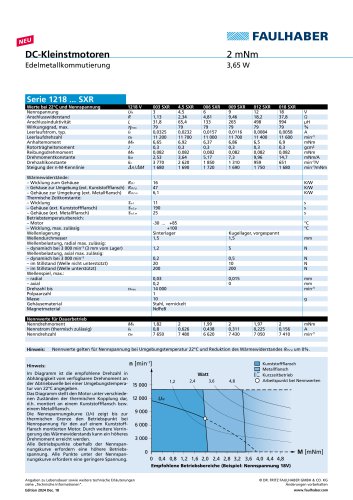
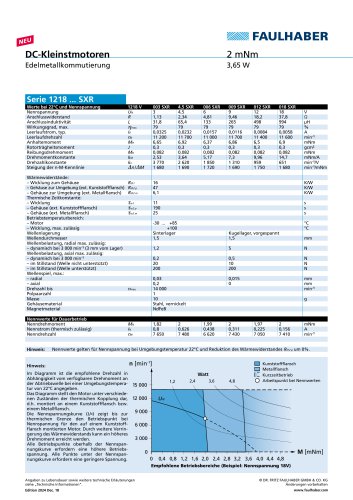 Serie 1218 ... SXR
Serie 1218 ... SXR2 Seiten
-
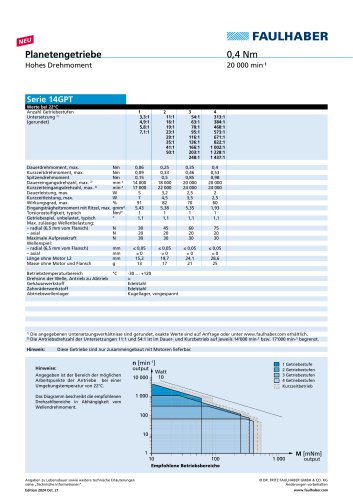 Serie 14GPT
Serie 14GPT2 Seiten
-
 FAULHABER motion 2024
FAULHABER motion 202436 Seiten
-
 FAULHABER motion 1/2023
FAULHABER motion 1/202332 Seiten
-
 Motion Controller MC 3603 S
Motion Controller MC 3603 S2 Seiten
-
 FAULHABER motion 1/2021
FAULHABER motion 1/202124 Seiten
-
 FAULHABER motion 2/2022
FAULHABER motion 2/202224 Seiten
-
 Linearaktuatoren L series
Linearaktuatoren L series12 Seiten
-
 FAULHABER motion 1/2022
FAULHABER motion 1/202233 Seiten
-
 Faulhaber motion 02/2021
Faulhaber motion 02/202128 Seiten
-
 Das Magazin mit Antrieb
Das Magazin mit Antrieb28 Seiten
-
 motion 1/2020
motion 1/202032 Seiten
-
 Technical Information
Technical Information162 Seiten
-
 motion 2/2019
motion 2/201928 Seiten
-
 FAULHABER motion 2/2017
FAULHABER motion 2/201728 Seiten
-
 FAULHABER motion 1/2017
FAULHABER motion 1/201728 Seiten
-
 Antriebssysteme
Antriebssysteme40 Seiten
-
 Das Magazin mit Antrieb
Das Magazin mit Antrieb28 Seiten
-
 EVOLUTION humanoider ROBOTIK
EVOLUTION humanoider ROBOTIK28 Seiten
-
 TECHNIK die unter DIE HAUT GEHT
TECHNIK die unter DIE HAUT GEHT24 Seiten






Archivierte Kataloge
-
 Antriebssysteme_2020
Antriebssysteme_2020521 Seiten
-
 news brochure
news brochure48 Seiten
-
 Das Magazin mit Antrieb 2019
Das Magazin mit Antrieb 201928 Seiten
-
 Antriebssysteme 2018 (FAULHABER Katalog)
Antriebssysteme 2018 (FAULHABER Katalog)572 Seiten
-
 FAULHABER motion Schweiz Special
FAULHABER motion Schweiz Special28 Seiten
-
 FAULHABER Info Ausgabe 1/2013
FAULHABER Info Ausgabe 1/201316 Seiten
-
 FAULHABER info AUSGABE 1/ 2012
FAULHABER info AUSGABE 1/ 201220 Seiten
-
 FAULHABER info Ausgabe 2 / 2011
FAULHABER info Ausgabe 2 / 201116 Seiten
-
 FAULHABER info Ausgabe 1/2011
FAULHABER info Ausgabe 1/201116 Seiten