- Kataloge
- FAULHABER Drive Systems
- Technical Information
Technical Information
1 /162Seiten

Technical Information
1 /162Seiten
Katalogauszüge

Technische Informationen
Katalog auf Seite 1 öffnen
Version: 12. Auflage, 2019 Copyright by Dr. Fritz Faulhaber GmbH & Co. KG Daimlerstr. 23 / 25 • 71101 Schönaich Alle Rechte, auch die der Übersetzung, vorbehalten. Ohne vorherige ausdrückliche schriftliche Genehmigung der Dr. Fritz Faulhaber GmbH & Co. KG darf kein Teil dieser Beschreibung vervielfältigt, reproduziert, in einem Informationssystem gespeichert oder verarbeitet oder in anderer Form weiter übertragen werden. Dieses Dokument wurde mit Sorgfalt erstellt. Die Dr. Fritz Faulhaber GmbH & Co. KG übernimmt jedoch für eventuelle Irrtümer diesem Dokument und deren Folgen keine Haftung. Ebenso...
Katalog auf Seite 2 öffnen
Inhaltsübersicht DC-Motoren DC-Kleinstmotoren DC-Flachmotoren & DC-Getriebemotoren Bürstenlose DC-Motoren Bürstenlose DC-Servomotoren Bürstenlose DC-Flachmotoren & DC-Getriebemotoren Motoren mit integrierter Elektronik Bürstenlose DC-Motoren mit integriertem Speed Controller Bürstenlose DC-Servomotoren mit integriertem Motion Controller Lineare DC-Servomotoren Lineare DC-Servomotoren Lineare Komponenten Kugelumlaufspindeln Spindeln und Optionen Encoder – 2 Kanäle Encoder – 3 Kanäle Encoder – Absolutencoder
Katalog auf Seite 3 öffnen
DC-Kleinstmotoren Technische Informationen Magnete: Seite FAULHABER DC-Motoren gibt es mit einer Vielzahl verschie32 – 33 dener Magnete, perfekt abgestimmt auf die Performance Edelmetallkommutierung 0,17 mNm 34 – 35 des jeweiligen Motortyps. Diese Materialien schließen Edelmetallkommutierung 0,72 mNm 36 – 37 AlNiCo-Magnete sowie hochwertige Seltene-Erden-Typen, Edelmetallkommutierung 0,59 mNm 38 – 39 wie z. B. SmCo und Edelmetallkommutierung NdFeB, ein. 2 mNm 40 – 41 Allgemeine Angaben FAULHABER S/G DC-Kleinstmotoren Beschreibung Baureihe Die FAULHABER-Wicklung: 0615 … S Die von Dr. Fritz Faulhaber...
Katalog auf Seite 5 öffnen
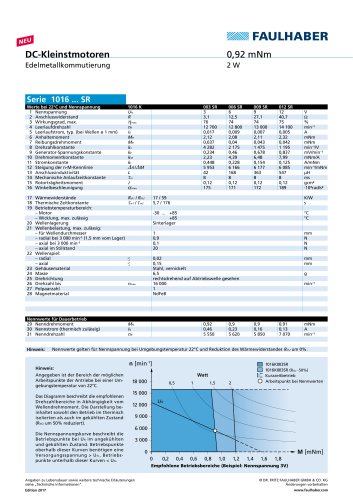
DC-Kleinstmotoren Technische Informationen Modifikationen: FAULHABER ist auf die Anpassung seiner Standardprodukte für kundenspezifische Anwendungen spezialisiert. Folgende Standardoptionen sind für FAULHABER DC-Motoren verfügbar: DC-Kleinstmotoren Edelmetallkommutierung ■ Anschlussleitungen (PTFE und PVC) und Stecker Werte bei 22°C und Nennspannung 1 Nennspannung 2 Anschlusswiderstand 3 Wirkungsgrad, max. 4 Leerlaufdrehzahl 5 Leerlaufstrom, typ. (bei Wellen ø 0,8 mm) 6 Anhaltemoment ■ Konfigurierbare Wellenlänge und zweites Wellenende ■ Modifizierte Wellengeometrie und Ritzelkonfigura- tionen wie...
Katalog auf Seite 6 öffnen
DC-Kleinstmotoren Technische Informationen Mechanische Anlaufzeitkonstante τm [ms] Die Zeit, die der Motor ohne Last benötigt, um vom Stillstand auf 63% der Enddrehzahl zu kommen. Leerlaufstrom des Motors durch Änderungen an der Welle, der Lagerung, der Schmierung und des Kommutierungssystems sowie Kombinationen mit anderen Komponenten wie z. B. Getrieben oder Encodern beeinflusst. Anhaltemoment MH [mNm] Das vom Motor bei Stillstand (stehender Rotor) und Nennspannung entwickelte Drehmoment. Dieser Wert kann sich 4,5 S durch Magnettyp und -temperatur sowie der Wicklungs4,5 V temperatur ändern....
Katalog auf Seite 7 öffnen
DC-Kleinstmotoren Technische Informationen Mechanische Anlaufzeitkonstante τm [ms] Reduzierung des Rth2-Wertes angegeben (ohne externe Kühlung). Dieser der Motor ohne Last benötigt, um vom der Die Zeit, die Wert kann überschritten werden, wenn StillMotorauf 63% der Enddrehzahl zu kommen. S2-Betrieb stand intermittierend betrieben wird, z. B. im und/oder wenn mehr Kühlung zum Einsatz kommt. Das R·J m = –––– Nenndrehmoment wird bei M 2 k einzelnen Motoren durch die resultierende Untergrenze der Nenndrehzahl (< 2 500 min-1) Rotorträgheitsmoment J [gcm bei Nennspannung begrenzt. 2] Das Massenträgheitsmoment...
Katalog auf Seite 8 öffnen
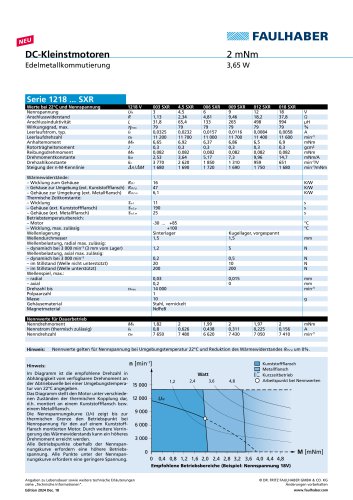
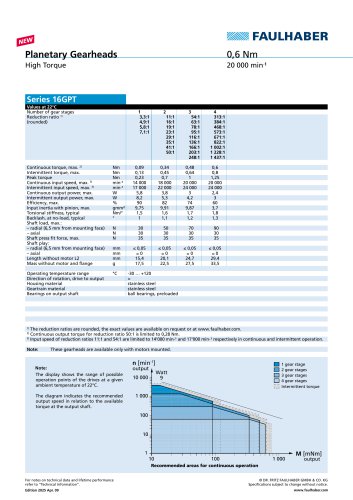
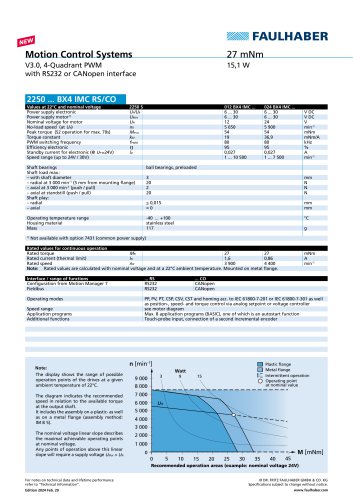
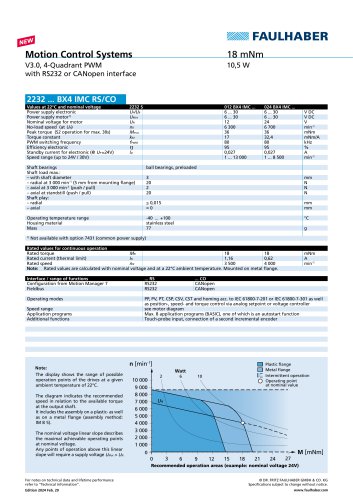
Verfügbarer Platz, max. Durchmesser/Länge Wellenbelastung radial/axial Beispiel: Leistungsdiagramm für Nennwerte bei Dauerbetrieb (Graphitkommutierung) Das Leistungsdiagramm zeigt den Bereich der möglichen Arbeitspunkte eines Antriebs bei einer Umgebungstemperatur von 22 °C und beinhaltet sowohl den Betrieb im thermisch isolierten wie auch im gekühlten Zustand. Dargestellt werden die möglichen Drehzahlbereiche in Abhängigkeit zum Wellendrehmoment. Der gestrichelt dargestellte Sektor beschreibt mögliche Arbeitspunkte, in denen der Antrieb im intermittierenden Betrieb oder bei erhöhter Kühlung...
Katalog auf Seite 9 öffnen
DC-Kleinstmotoren Technische Informationen Mechanische Haltestrom Anlaufzeitkonstante τm [ms] Die Zeit, die der Motor ohne Last benötigt, um vom StillUN IH = ––– Enddrehzahl zu kommen. stand auf 63% R der Leerlaufstrom betreiben. Bitte Änderungen dass das Nennwert" zudes Motors durchbeachten Sie, an der Welle, der Lagerung, der Schmierung und des KommutierungsDiagramm im Datenblatt ein repräsentatives Beispiel im systems auf eine Nennspannung anderen Komponenten Hinblicksowie Kombinationen mitist und nur der Orientiewie z. B. Getrieben rung dienen sollte. oder Encodern beeinflusst. Anhaltemoment...
Katalog auf Seite 10 öffnen
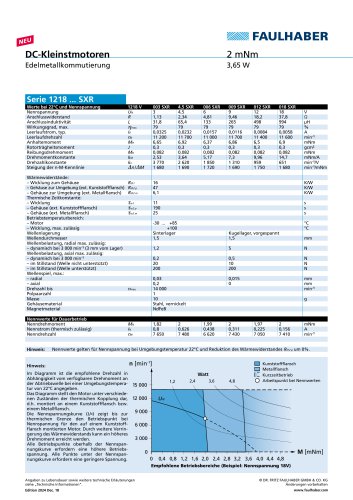
Berechnung der wichtigsten Parameter In der vorliegenden Anwendung ist die verfügbare Versorgungsspannung niedriger als die Nennspannung des ausgewählten Motors. Die Berechnung unter Last wird deshalb mit 20 V ausgeführt. Leerlaufdrehzahl no bei 20 V n = U - (-■ R) ° 2 n ■ kM Berechnung des Betriebspunktes bei 20 V Unter Berücksichtigung des Drehmoments (M=3 mNm) am Arbeitspunkt können I, n, P2 und n wie folgt berechnet werden: Strom am Betriebspunkt M + Mr mit den Werten Versorgungsspannung Anschlusswiderstand Leerlaufstrom Drehmomentkonstante Abgabeleistung am Betriebspunkt P2 = M • 2 n • n...
Katalog auf Seite 11 öffnen
DC-Kleinstmotoren Technische Informationen Motorkennlinien Mechanische Anlaufzeitkonstante τm [ms] Die verschiedenen ParameterLast ein bestimmtes DrehZeit, die der Motor ohne für benötigt, um vom Stillmoment können dem Diagramm 2 entnommen werden. stand auf 63% der Enddrehzahl zu kommen. Leerlaufstrom Temperatur der Änderungen an der Schätzung derdes Motors durchMotorwicklung im Welle, der Lagerung, der Betriebszustand: Schmierung und des Kommutierungssystems sowie Kombinationen mit anderen Komponenten Um sicherzustellen, dass der Motor in einem zulässigen wie z. B. Getrieben arbeitet, ist es...
Katalog auf Seite 12 öffnenAlle Kataloge und technischen Broschüren von FAULHABER Drive Systems
 FAuLHABER motion 01/2026
FAuLHABER motion 01/202648 Seiten
 FAULHABER motion 2025
FAULHABER motion 202536 Seiten
 Serie 1218 ... SXR
Serie 1218 ... SXR2 Seiten
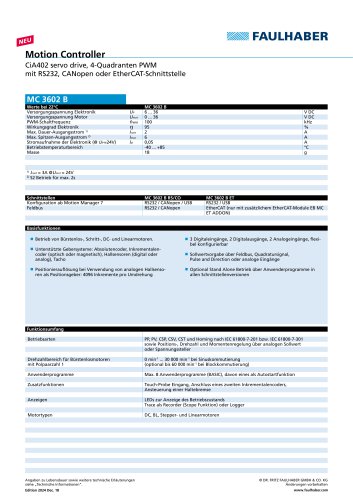 MC 3602 B
MC 3602 B2 Seiten
 Serie 1228 ... SXR
Serie 1228 ... SXR2 Seiten
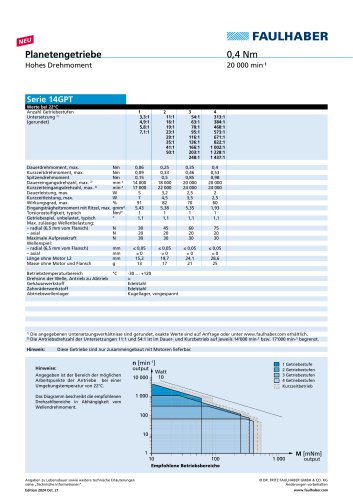 Serie 14GPT
Serie 14GPT2 Seiten
 FAULHABER motion 2024
FAULHABER motion 202436 Seiten
 FAULHABER motion 1/2023
FAULHABER motion 1/202332 Seiten
 Motion Controller MC 3603 S
Motion Controller MC 3603 S2 Seiten
 FAULHABER motion 1/2021
FAULHABER motion 1/202124 Seiten
 FAULHABER motion 2/2022
FAULHABER motion 2/202224 Seiten
 Linearaktuatoren L series
Linearaktuatoren L series12 Seiten
 FAULHABER motion 1/2022
FAULHABER motion 1/202233 Seiten
 Faulhaber motion 02/2021
Faulhaber motion 02/202128 Seiten
 Das Magazin mit Antrieb
Das Magazin mit Antrieb28 Seiten
 motion 1/2020
motion 1/202032 Seiten
 motion 2/2019
motion 2/201928 Seiten
 FAULHABER motion 2/2017
FAULHABER motion 2/201728 Seiten
 FAULHABER motion 1/2017
FAULHABER motion 1/201728 Seiten
 Antriebssysteme
Antriebssysteme40 Seiten
 Das Magazin mit Antrieb
Das Magazin mit Antrieb28 Seiten
 EVOLUTION humanoider ROBOTIK
EVOLUTION humanoider ROBOTIK28 Seiten
 TECHNIK die unter DIE HAUT GEHT
TECHNIK die unter DIE HAUT GEHT24 Seiten
 Encoders - Series IEX3- L
Encoders - Series IEX3- L2 Seiten








Archivierte Kataloge
 Das Magazin mit Antrieb 2019
Das Magazin mit Antrieb 201928 Seiten
 Antriebssysteme_2020
Antriebssysteme_2020521 Seiten
 FAULHABER Info Ausgabe 1/2013
FAULHABER Info Ausgabe 1/201316 Seiten
 news brochure
news brochure48 Seiten
 FAULHABER info AUSGABE 1/ 2012
FAULHABER info AUSGABE 1/ 201220 Seiten
 FAULHABER info Ausgabe 2 / 2011
FAULHABER info Ausgabe 2 / 201116 Seiten
 FAULHABER info Ausgabe 1/2011
FAULHABER info Ausgabe 1/201116 Seiten
 FAULHABER motion Schweiz Special
FAULHABER motion Schweiz Special28 Seiten
 Antriebssysteme 2018 (FAULHABER Katalog)
Antriebssysteme 2018 (FAULHABER Katalog)572 Seiten