- Kataloge
- IPR - Intelligente Peripherien für Roboter GmbH
- Hotforming-Systeme
Hotforming-Systeme
1 /70Seiten

Hotforming-Systeme
1 /70Seiten
Katalogauszüge

KUNDENSPEZIFISCHE LÖSUNGEN HANDLING SYSTEME HOT FORMING PLATINEN
Katalog auf Seite 1 öffnen
Inhaltsverzeichnis Handlingsystem für Hot Forming Platinen Bezeichnung Seite 1. Firmenportrait IPR 1.1 IPR - Intelligente Peripherien für Roboter GmbH Industriestraße 29 D-74193 Schwaigern Technische Änderungen vorbehalten
Katalog auf Seite 2 öffnen
Inhaltsverzeichnis Handlingsystem für Hot Forming Platinen Bezeichnung Seite 5. Aktuatoren Bauteilabfrage gefedert HF-BA01 5.1 Winkelgreifer für Warmplatinen mit Kurzfinger HF-WG01 5.3 Winkelgreifer für Warmplatinen mit Langfinger HF-WG02 5.4 Winkelgreifer für Kaltplatinen HF-WG03-3 ohne Sensoren 5.5 Winkelgreifer für Kaltplatinen HF-WG03-4 mit Sensoren 5.6 Winkelgreifer für Warmplatinen HF-WG04-3 ohne Sensoren 5.7 Winkelgreifer für Warmplatinen HF-WG04-4 mit Sensoren 5.8 Winkelgreifer für Warmplatinen HF-WG04-5 ohne Sensoren 5.9 Winkelgreifer für Warmplatinen HF-WG04-6...
Katalog auf Seite 3 öffnen
Die Firma IPR - Intelligente Peripherien für Roboter GmbH wurde mit dem Ziel der Entwicklung und Fertigung von qualitativ hochwertigem Montage- und Roboterzubehör gegründet. Unser Produktionsprogramm umfasst u.a. Füge- und Ausgleichselemente, Greifer, Werkzeugwechsler, Kollisionsschutzsysteme und Kraftmomentensensoren. Es ist unser Bestreben, unseren Kunden wirtschaftliche Problemlösungen aus einer Hand anzubieten. Eine leistungsfähige Entwicklungsabteilung und modernste Fertigungsverfahren garantieren die Präzision und Qualität unserer Produkte. Am Unternehmenshauptsitz - Schwaigern in Baden-Württemberg...
Katalog auf Seite 4 öffnen
Handlingsystem für Hot Forming Platinen Die Warmumformung von Platinen bedingt besondere Technologien. Zum Transport der ca. 1000°C heißen Platinen in die Formwerkzeuge werden speziell gekapselte, isolierte und hitzebeständige Greifwerkzeuge benötigt. Auch für die Entnahme der umgeformten, noch 200-250°C heißen Werkstücke sind besondere Greifwerkzeuge erforderlich. Gleiches gilt für die elektrische Überwachung der Greifer und elektrische Kontrolle der Bauteile. Speziell für diese Anwendungen hat IPR einen kompletten Systembaukasten entwickelt. Aus diesem lassen sich alle erforderlichen Handlingsaufgaben...
Katalog auf Seite 5 öffnen
MontagehinweiseHandlingsystem für Hot Forming Platinen Blatt: 2.2 4.Mechanische Greifer für warme und kalte Platinen 5.Elektrische Abfragen für warme und kalte Platinen IPR - Intelligente Peripherien für Roboter GmbH Industriestraße 29 D-74193 Schwaigern Technische Änderungen vorbehalten
Katalog auf Seite 6 öffnen
Montagehinweise Handlingsystem für Hot Forming Platinen Beispiel für Greifer zum Handling der Rohplatinen: Der abgebildete Greifer zeigt ein Beispiel für einen Greifer zum Aufnehmen der Rohplatine vom Zuführstapel und Auflegen auf die Zuführung zum Wärmeofen. Die Platine wird mittels Vakuumsaugern aufgenommen. Die Vakuumsauger sind zum Ausgleich von Höhendifferenzen und höherer Anfahrgeschwindigkeit federnd gelagert. Die Stapelhöhe wird beim anfahren des Bauteils mit einem federnden Stößeltaster ermittelt. Bei Bedarf können noch zusätzliche Bauteilabfragen und eine Doppelblechkontrolle vorgesehen werden....
Katalog auf Seite 7 öffnen
Handlingsystem für Hot Forming Platinen Beispiel für Greifer zum Handling der heißen Platine: Der abgebildete Greifer zeigt ein Beispiel für einen Greifer zum Aufnehmen der auf ca. 1000°C erhitzten Platine aus dem Auslauf des Ofens und einlegen in die Formpresse. Die Platine wird mittels hitzebeständigen Winkelgreifern mechanisch gegriffen. Zum Schutz der Installation und zur Vermeidung von Strahlungsverlusten kann die heiße Platine mit einem Hitzeschutzschild aus Edelstahl abgedeckt werden. In der Regel wird auf diese Abdeckung verzichtet. Aufgrund der extremen Temperaturen wird auf eine elektrische...
Katalog auf Seite 8 öffnen
Handlingsystem für Hot Forming Platinen Beispiel für Greifer zum Handling der kalten Platine: Der abgebildete Greifer zeigt ein Beispiel zur Entnahme des noch ca. 200°C - 400°C warmen, umgeformten Bauteils. Die Platine wird mit den hitzebeständigen Winkelgreifern mechanisch gegriffen und aus dem Formwerkzeug entnommen. Ein Hitzeschutzschild ist nicht erforderlich. Mittels warmfester Stößeltaster kann das Bauteil elektrisch abgefragt werden. Auch die mechanischen Greifer können mit warmfesten Sensoren überwacht werden. Je nach Anlagenlayout wird das Bauteil abgelegt oder weiteren Prozessen zugeführt....
Katalog auf Seite 9 öffnen
Werkzeugwechsler TK-125-R Roboterseite Blatt: 3.1 Technische Daten Modell Artikel-Nr. Empfohlenes max. Handlingsgewicht bei Abstand Masseschwerpunkt kleiner als Masse (ohne Anbauteile/Steckerleiste) Zylinderbohrung Luftverbrauch pro Zyklus öffnen/schliessen Max. Zugkraft Fz(statisch) bei p=6bar Max. Druckkraft Fd (statisch) Max. Biegemoment Mx, My (statisch) bei p=6bar Max. Torsionsmoment Mz (statisch) bei p=6bar Wiederholgenauigkeit x-, y-, z-Achse Fügekraft in Fügerichtung (Kolben in Pos. entriegelt) Max. zul. Achsabweichung x/y Max. Abstand Roboter-/Greiferseite zum verriegeln Kuppelweg Energieübertragung...
Katalog auf Seite 10 öffnen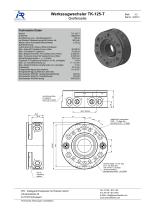
Werkzeugwechsler TK-125-T Greiferseite Blatt: 3.2 Technische Daten Modell Artikel-Nr. Empfohlenes max. Handlingsgewicht bei Abstand Masseschwerpunkt kleiner als Masse (ohne Anbauteile/Steckerleiste) Zylinderbohrung Luftverbrauch pro Zyklus öffnen/schliessen Max. Zugkraft Fz(statisch) bei p=6bar Max. Druckkraft Fd (statisch) Max. Biegemoment Mx, My (statisch) bei p=6bar Max. Torsionsmoment Mz (statisch) bei p=6bar Wiederholgenauigkeit x-, y-, z-Achse Fügekraft in Fügerichtung (Kolben in Pos. entriegelt) Max. zul. Achsabweichung x/y Max. Abstand Roboter-/Greiferseite zum verriegeln Kuppelweg Energieübertragung...
Katalog auf Seite 11 öffnen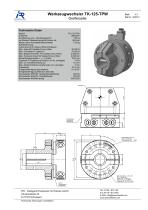
Technische Daten Modell Artikel-Nr. Empfohlenes max. Handlingsgewicht bei Abstand Masseschwerpunkt kleiner als Masse (ohne Anbauteile/Steckerleiste) Zylinderbohrung Luftverbrauch pro Zyklus öffnen/schliessen Max. Zugkraft Fz(statisch) bei p=6bar Max. Druckkraft Fd (statisch) Max. Biegemoment Mx, My (statisch) bei p=6bar Max. Torsionsmoment Mz (statisch) bei p=6bar Wiederholgenauigkeit x-, y-, z-Achse Fügekraft in Fügerichtung (Kolben in Pos. entriegelt) Max. zul. Achsabweichung x/y Max. Abstand Roboter-/Greiferseite zum verriegeln Kuppelweg Energieübertragung pneumatisch Energieübertragung elektrisch...
Katalog auf Seite 12 öffnenAlle Kataloge und technischen Broschüren von IPR - Intelligente Peripherien für Roboter GmbH
 Roboter-Portale
Roboter-Portale6 Seiten
 Fahrachse für Kleinroboter
Fahrachse für Kleinroboter2 Seiten
 Fahrachsen
Fahrachsen10 Seiten
 Fahrachsen aus Verbundbeton
Fahrachsen aus Verbundbeton6 Seiten
 IPR Katalog Standard
IPR Katalog Standard372 Seiten
 Übersicht greiftechnik
Übersicht greiftechnik6 Seiten
 Werkzeugwechsler
Werkzeugwechsler10 Seiten
 new products
new products6 Seiten



Archivierte Kataloge
 Hot forming platinen
Hot forming platinen62 Seiten
 Roboter fahrachse
Roboter fahrachse6 Seiten
 Solar
Solar4 Seiten
 Robotic peripherals
Robotic peripherals5 Seiten
 Cavity waxing
Cavity waxing4 Seiten
 Special grippers
Special grippers4 Seiten
- Kraftaufnehmer
- Kraftaufnehmer / Zug- und Druckkraft
- Stahl-Wägezelle
- Edelstahl-Kraftaufnehmer
- Druckluftbetriebene Greifzange
- Parallele Greifzange
- 2-Backen-Greifer
- Analoger Kraftaufnehmer
- Linearachse
- Aluminium-Kraftaufnehmer
- Kompakter Kraftaufnehmer
- Zugkraft-Kraftaufnehmer
- Elektrische Linearachse
- Kompakte Greifzange
- Greifzange für Materialumschlag
- Digitaler Kraftaufnehmer
- Werkzeugwechsler für Roboter
- Präzisions-Linearachse
- Greifzange / 3 Backen