Der QuickStep Motor. Schrittmotoren mit integrierter Ansteuerelektronik MIS231, MIS232, MIS234
1 /8Seiten

Der QuickStep Motor. Schrittmotoren mit integrierter Ansteuerelektronik MIS231, MIS232, MIS234
1 /8Seiten
Katalogauszüge

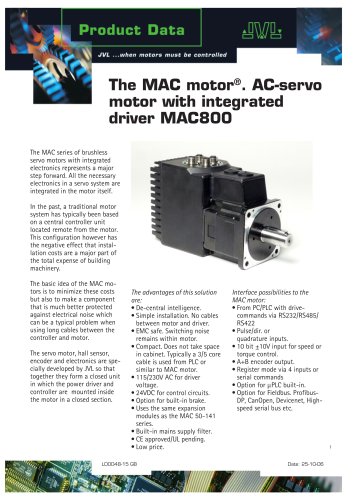
Die Baureihe der QuickStep Schrittmotoren mit integrierter Elektronik stellt einen großen Fortschritt dar. Die gesamte Elektronik für ein Schrittmotorsystem ist direkt im Motor integriert. Früher wurde bei einem Motorsystem der Controller in der Regel extern in einiger Entfernung vom Motor installiert. Diese Konfiguration hat jedoch den entscheidenden Nachteil, dass die Installation der Kabel beträchtliche Kosten beim Bau einer Maschine verursacht. Die Grundidee beim QuickStep Motor besteht darin, die Kosten zu minimieren und gleichzeitig eine bessere Störspannungsfestigkeit durch wesentlich kür- Der QuickStep Motor. Schrittmotoren mit integrierter Ansteuerelektronik MIS231, MIS232, MIS234 zere Kabel zwischen Controller und Motor zu erzielen. Der Schrittmotor, der Encoder und die Elektronik wurden von JVL speziell so entwickelt, dass Motor und Treiber/Controller eine abgeschirmte Einheit bilden. Die Vorteile dieser Lösung: Dezentrale Intelligenz. Einfache Installation. Kein Kabel zwischen Motor und Treiber. EMV-geschützt. Schaltstörungen bleiben im Motorgehäuse. Compakt. Beansprucht wenig Platz. 12-48VDC Spannungsversorgung. Preisgünstige Alternative •• • • • • zu einem separaten Schrittoder Servomotor und Treiber. Schnittstellen-Optionen für den QuickStep Motor: Von PC/SPS Kommandos über RS485. Puls/Richtungs-Eingang. Encoder-Ausgang. Option für integrierte ìSPS mit grafischer Programmierung. CANopen, DeviceNet 8 E/As, 5-28VDC, können als Eingänge, Ausgänge oder Analogeingänge konfiguriert werden Künftige Optionen für Profibus DP, Ethernet, Bluetooth und Zigbee Wireless • • • •• • LD0063-11DE Date: 5-2-09
Katalog auf Seite 1 öffnen
Quickstep ist eine Baureihe von JVL, die mit zahlreichen Funktionen und in vielen Kombinationen erhältlich ist. Sie basiert auf einem NEMA23 High-Torque- Schrittmotor mit einem Gehäuse der Schutzklasse IP55. Im Gehäuse können ein oder mehrere Leiterkarten und verschiedene Anschlüsse montiert werden, um den Motor an bestimmte Aufgaben anzupassen. Der Motor ist auch ohne Elektronik erhältlich. Optional mit Encoder. Alle Module sind mit M12, Kabelverschraubung oder (Stückzahl >50 Stück) vom Kunden gewählten Verbindungssteckern erhältlich. 1,1Nm-, 1,6Nm- und 2,9Nm-Version. Spielfreie und Planeten-Getriebe...
Katalog auf Seite 2 öffnen
Januar 2004 Betriebsarten Positionier- und Geschwindigkeits-Modus Die Positionierung des QuickStep Motors erfolgt über Kommandos, die über die serielle Schnittstelle gesendet werden. Verschiedene Betriebsparameter können bei laufendem Motor verändert werden. Diese Betriebsart wird hauptsächlich in Systemen verwendet, bei denen der Controller über die Schnittstelle permanent mit dem PC/ der SPS verbunden ist. Dieser Modus ist beim Aufbau und Testen des Systems sehr vorteilhaft und wird auch auch zur Programmierung verwendet. Getriebe-Modus Der QuickStep Motor verhält sich wie ein Schrittmotor-System....
Katalog auf Seite 3 öffnen
Setup und Programmierung mit MacTalk Software Einführung MacTalk Die MacTalk Software dient zum Einrichten des QuickStep Motors für eine bestimmte Aufgabe. Das Programm bietet folgende Funktionen: Wahl der Betriebsart des QuickStep Motors. Ändern wichtiger Parameter wie Drehzahl, Motorstrom, Referenzfahrt etc. • • Echtzeit-Überwachung aktueller Motorparameter wie Versorgungsspannung, Eingangsstatus, etc. Ändern von Schutzbegrenzungen wie Positionsgrenzen. Speichern aller aktuellen Parameter auf Testplatte. Wiederherstellung aller Parameter von Testplatte. Permanentes Speichern aller Para- • •...
Katalog auf Seite 4 öffnen
Drehmoment/Drehzahl-Kurve Min. Max. Absolut Max. Einh. P+ 12 48 - VDC CVI 12 28 32 VDC CVI kein Ausgang aktiviert 95@24VDC mA Motor Current 0 3 3 A RMS Eingangslogik Low -0.5 0.9 VDC Eingangslogik High 1.9 28 32 VDC Ausgangslogik High 12 28 32 VDC Analoger Eingang 0 5 32 VDC Ausgangsstrom 350* mA Technische Motordaten Quickstep- und MAC-Motor in einem RS485- oder CANbus-Netzwerk Zubehör Motor Typ MIS231 MIS232 MIS234 Einheit Max. Drehzahl 1000 1000 1000 min-1 Nennmoment 1.1 1.6 2.9 Nm Nennmoment bei 500 min-1 (48VDC) 0.55 0.6 0.65 Nm Trägheitsmoment 0.3 0.48 0.96 kgcm2 Länge 96.0 118.5 154.0...
Katalog auf Seite 5 öffnen
Versionen mit Puls und Richtungssteuerung: Anschlüsse für Versionen mit einem M12- Stecker (siehe auch Datenblatt SMD73): M12-Stecker 5-polig Beschreibung 1 P+ (18-28VDC) 2 Puls 3 P- 4 Richtung 5 Signalerde Farbcode Beschreibung Rot P+ (8-28VDC) Schwarz PBlau Richtung Weiß Puls Abschirmung Signalerde Versionen mit Positionier- und Drehzahlsteuerung: Anschlüsse für Versionen mit Kabelver- 5-poliger Stecker schraubung und 5 m Kabel Pin Nr. Farbe 1 Braun 2 Weiß 3 Blau 4 Schwarz 5 Grau 8-poliger Stecker Pin Nr. Farbe 1 Weiß 2 Braun 3 Grün 4 Gelb 5 Grau 6 Rosa 7 Blau 8 Rot QUICKSTEP M12 Stecker Übersicht...
Katalog auf Seite 6 öffnen
Motor Typ Größe Generation IP und Schaft Anschluss Feedback Treibertechnologie Schrittauflösung mA in Treiber Eingabeformat Standbystrom- Verhältnis MIS 232 A 1 M2 N0 73 8 10 E 3 1 bis 31 Standbystrom-Verhältnis (03 = 1/3 Standbystrom) # D 24V NPN Eingänge E 24V PNP Eingänge F 5V Eingänge xx xx mA*100/Phase wählen. Siehe Datenblatt SMD73 0 Kein Treiber # 1 1/1 Schritt (mit 200 Schritten/Umdrehung Motor 200 Pulse/Umdrehung) 2 1/2 Schritt (mit 200 Schritten/Umdrehung Motor 400 Pulse/Umdrehung) 4 1/4 Schritt (mit 200 Schritten/Umdrehung Motor 800 Pulse/Umdrehung) 5 1/5 Schritt (mit 200 Schritten/Umdrehung...
Katalog auf Seite 7 öffnenAlle Kataloge und technischen Broschüren von JVL A/S
 Mac Motor brochure
Mac Motor brochure2 Seiten
 Integrierter ServoStep NEMA23
Integrierter ServoStep NEMA232 Seiten
 MAC140-F
MAC140-F2 Seiten
 Integrated ServoStep NEMA17
Integrated ServoStep NEMA173 Seiten
 JVL closed-loop
JVL closed-loop2 Seiten
 Power supplies psu48
Power supplies psu482 Seiten
 ld058gb
ld058gb4 Seiten
 ld044gb
ld044gb4 Seiten
 ld016gb
ld016gb4 Seiten
 ld025gb
ld025gb4 Seiten
 ld011gb
ld011gb2 Seiten
 ld008gb
ld008gb2 Seiten
 ld022gb
ld022gb2 Seiten
 ld021gb
ld021gb2 Seiten
 ld038gb
ld038gb2 Seiten
 DC Motor Controller DMC10
DC Motor Controller DMC102 Seiten













Archivierte Kataloge



- AMOT Elektromotor
- AMOT Stromversorgung
- AMOT DC-Stromversorgung
- Displaymodul
- AMOT DC-Motor
- AMOT AC/DC-Netzteil
- Stromkabel
- Encoder
- AMOT Antrieb
- Mehrpoliger Motor
- LCD-Anzeigetafel
- AMOT Automatisierungssoftware
- AMOT Linearantrieb
- Winkelgeber
- Elektrischer Antrieb
- AMOT Planetengetriebe
- AMOT koaxiales Getriebe
- Industrie-Anzeigetafel
- Versorgungs-Stromkabel