- Kataloge
- KLASCHKA Sensor & Motion Technologies
- Überwachung von Werkzweugwechselkupplungen
Überwachung von Werkzweugwechselkupplungen
1 /4Seiten
Überwachung von Werkzweugwechselkupplungen
1 /4Seiten
Katalogauszüge

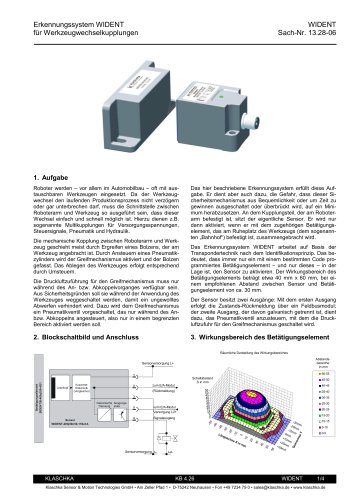
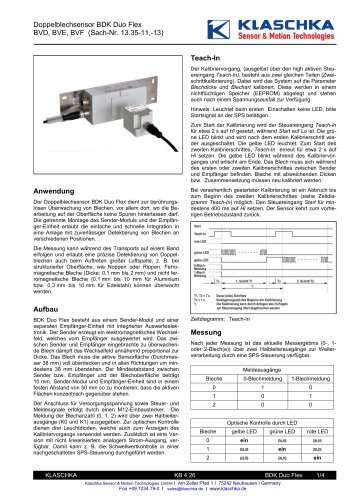
Erkennungssystem WIDENT für Werkzeugwechselkupplungen 1. Aufgabe Roboter werden – vor allem im Automobilbau – oft mit austauschbaren Werkzeugen eingesetzt. Da der Werkzeugwechsel den laufenden Produktionsprozess nicht verzögern oder gar unterbrechen darf, muss die Schnittstelle zwischen Roboterarm und Werkzeug so ausgeführt sein, dass dieser Wechsel einfach und schnell möglich ist. Hierzu dienen z.B. sogenannte Multikupplungen für Versorgungsspannungen, Steuersignale, Pneumatik und Hydraulik. Die mechanische Kopplung zwischen Roboterarm und Werkzeug geschieht meist durch Ergreifen eines Bolzens, der am Werkzeug angebracht ist. Durch Ansteuern eines Pneumatikzylinders wird der Greifmechanismus aktiviert und der Bolzen gefasst. Das Ablegen des Werkzeuges erfolgt entsprechend durch Umsteuern. Die Druckluftzuführung für den Greifmechanismus muss nur während des An- bzw. Abkoppelvorganges verfügbar sein. Aus Sicherheitsgründen soll sie während der Anwendung des Werkzeuges weggeschaltet werden, damit ein ungewolltes Abwerfen verhindert wird. Dazu wird dem Greifmechanismus ein Pneumatikventil vorgeschaltet, das nur während des Anbzw. Abkoppelns angesteuert, also nur in einem begrenzten Bereich aktiviert werden soll. Das hier beschriebene Erkennungssystem erfüllt diese Aufgabe. Er dient aber auch dazu, die Gefahr, dass dieser Sicherheitsmechanismus aus Bequemlichkeit oder um Zeit zu gewinnen ausgeschaltet oder überbrückt wird, auf ein Minimum herabzusetzen. An dem Kupplungsteil, der am Roboterarm befestigt ist, sitzt der eigentliche Sensor. Er wird nur dann aktiviert, wenn er mit dem zugehörigen Betätigungselement, das am Ruheplatz des Werkzeugs (dem sogenannten „Bahnhof“) befestigt ist, zusammengebracht wird. Das Erkennungssystem WIDENT arbeitet auf Basis der Transpondertechnik nach dem Identifikationsprinzip. Das bedeutet, dass immer nur ein mit einem bestimmten Code programmiertes Betätigungselement – und nur dieses – in der Lage ist, den Sensor zu aktivieren. Der Wirkungsbereich des Betätigungselements beträgt etwa 40 mm x 60 mm, bei einem empfohlenen Abstand zwischen Sensor und Betätigungselement von ca. 30 mm. Der Sensor besitzt zwei Ausgänge: Mit dem ersten Ausgang erfolgt die Zustands-Rückmeldung über ein Feldbusmodul; der zweite Ausgang, der davon galvanisch getrennt ist, dient dazu, das Pneumatikventil anzusteuern, mit dem die Druckluftzufuhr für den Greifmechanismus geschaltet wird. 3. Wirkungsbereich des Betätigungselement Räumliche RäumlicheDarstellung Darstellungdes desWirkungsbereiches Wirkungsbereiches Abstandsbereiche in mm gung L+ Sensorversor Sensorversorgung L+ Signalausgang Signalausgang vom vom E/A-Modul E/A-Modul Versorgung L2+ Versorgung L2+ Galvanische AusgangsTrennung stufe (Rückmeldung) (Rückmeldung) AuswerteElektronik (Vergleicher) Klaschka Sensor & Motion Technologies GmbH • Am Zeller Pfad 1 • D-75242 Neuhausen • Fon +49
Katalog auf Seite 1 öffnen
Erkennungssystem WIDENT für Werkzeugwechselkupplungen Schaltabstand in der Längsachse 55 Querachse Y 0 Abweichung X von der Referenzposition (Sensormitte) in mm Schaltabstand in der Querachse (senkrecht zur Längsachse) 55 empfohlener Abstand Abweichung Y von der Referenzposition (Sensormitte) in mm Klaschka Sensor & Motion Technologies GmbH • Am Zeller Pfad 1 • D-75242 Neuhausen • Fon +49 7234 79 0 • [email protected] • www.klaschka.de
Katalog auf Seite 2 öffnen
Erkennungssystem WIDENT für Werkzeugwechselkupplungen 4. Technische Daten Bezeichnung Schaltabstand, Hysterese Gesicherter Ausschaltabstand Bauform, Gehäusematerial gerade, Kunststoff gewinkelt, Kunststoff nicht bündig einbaubar Schutzart, Gewicht Anschlussbild, Adernfarben 1: braun 2: weiß 3: gelb 4: grün 5: grau 1: braun 2: weiß 3: gelb 4: grün 5: grau Leitung ungeschirmt - Leitung ungeschirmt - Schließer (Dreipol) Schließer (Zweipol) Abfallzeit (Impulsverlängerung) nach Anlegen der Versorgung ca. 1 s Verpol-, Kurzschlussschutz Klaschka Sensor & Motion Technologies GmbH • Am Zeller Pfad 1 •...
Katalog auf Seite 3 öffnen
Erkennungssystem WIDENT für Werkzeugwechselkupplungen 13.14-68 Quader 40 x 25 x 100 mm, PA strahlenvernetzt Metallische Teile seitlich oder hinter dem Betätigungselement sind zulässig, können jedoch den Wirkungsbereich geringfügig beeinträchtigen. -30 ... +70 °C Schutzart, Gewicht Bauform, Gehäusematerial Einbauvorschrift 5. Bestellbezeichnungen WIDENT-40fq50n50-11Se1A Schalter für den Einsatz an Werkzeugwechselkupplungen für Roboter SIDENT/B-40fq100-4O1 Betätigungselement zum Einsatz an Werkzeugwechselkupplungen für Roboter VLG5E/6/X-1 Anschlussleitung, 5-polige Buchse mit geradem Abgang Leitungslänge...
Katalog auf Seite 4 öffnenAlle Kataloge und technischen Broschüren von KLASCHKA Sensor & Motion Technologies
 Erkennungssystem WIDENT
Erkennungssystem WIDENT9 Seiten
 Positionserkennung
Positionserkennung9 Seiten
 Klaschka - Produktübersicht
Klaschka - Produktübersicht6 Seiten
 Katalog ALSEN TK2
Katalog ALSEN TK245 Seiten
 Katalog ALSEN TK1
Katalog ALSEN TK193 Seiten
 Katalog ALSEN TK9
Katalog ALSEN TK911 Seiten
 Klaschka_Drehzahl-Messrelais_ALDIF
Klaschka_Drehzahl-Messrelais_ALDIF23 Seiten




Archivierte Kataloge
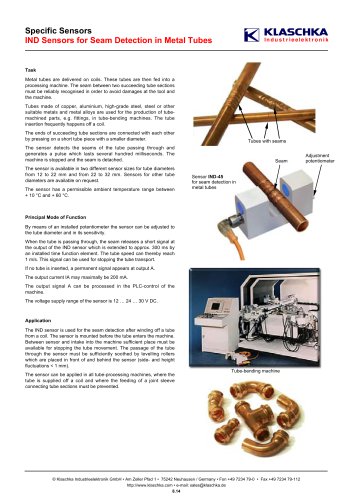 Seam Detection
Seam Detection2 Seiten
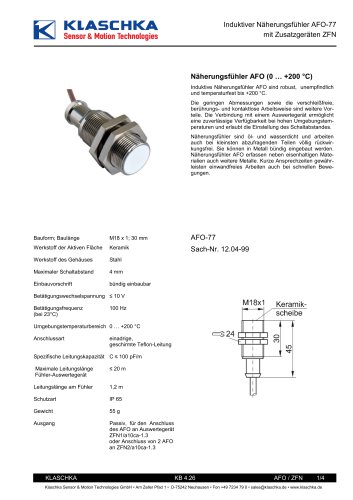
- AMOT Näherungssensor
- AMOT zylinderförmiger Näherungssensor
- AMOT induktiver Näherungssensor
- Frequenzumrichter
- AMOT Abstandssensor
- Überwachungsrelais
- Kompakter Detektor
- Gewinde-Näherungssensor
- AMOT rechteckiger Näherungssensor
- Signalwandler
- Überwachungsrelais für DIN-Schiene
- Magnet-Geschwindigkeitssensor
- Drehzahlsensor
- Analoger Abstandssensor
- AMOT kontaktloser Näherungssensor
- M30-Näherungssensor
- Spannungsüberwachungsrelais
- Kapazitiver Näherungssensor
- Zylinderförmiger Abstandssensor
- Signalwandler für DIN-Schiene