Doppelschwinge Typ AD-P
1 /5Seiten

Doppelschwinge Typ AD-P
1 /5Seiten
Katalogauszüge

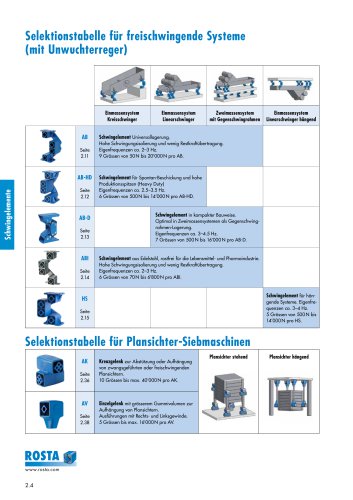
Selektionstabelle für geführte Systeme (mit Schubkurbelantrieb) Zweimassensystem mit direktem Massenausgleich Einzellenker in beliebiger Länge konzipierbar. Ausführungen mit Rechts- und Linksgewinde. 7 Grössen bis max. 5’000 N pro Schwinge. Einzellenker mit normiertem Achsabstand. 6 Grössen bis max. 2’500 N für Flanschbefestigung. 6 Grössen bis max. 2’500 N für Zentralbefestigung. Einmassensystem ohne Federspeicher Doppellenker mit normiertem Achsabstand. 5 Grössen bis max. 2’500 N für Flansch‑ befestigung. 4 Grössen bis max. 1’600 N für Zentral‑ befestigung. Einzellenker sowie Doppellenker in variabler Länge konzipierbar, Verbindung der AR-Elemente mittels Rundrohr. Zweimassensysteme mit gegenläufiger Material-Förderrichtung einfachst herstellbar. 2 Grössen bis max. 800 N pro Schwinge. Schubstangenkopf zur Übertragung der Schubkurbelbewegung auf Schwingsysteme. Ausführungen mit Rechts- und Linksgewinde. 9 Grössen bis max. 27’000 N pro Schubstangenkopf. Federspeicher mit hohem dynamischem Federwert für resonanznah laufende Schwingsysteme. Ein Federspeicher besteht aus 2 Stück DO-A-Elementen. 5 Grössen bis max. dynamischem Federwert von 320 N/mm. Hinweise zu einigen Spezialausführungen: – Für freischwingende Systeme auf Seiten 2.16–2.19 – Für geführte Systeme auf Seiten 2.31–2.33 – Für Plansichter-Siebmaschinen auf Seite 2.34
Katalog auf Seite 1 öffnen
Technologie 1. Einmassensystem ohne Federspeicher: Berechnung Lenker Antrieb Federwert Rinnenlänge Masse leere Rinne Fördergut auf Rinne Davon ca. 50% Ankopplung * Gesamte schwingende Masse * Exzenterradius Schwingweite Drehzahl Rinne Erdbeschleunigung Maschinenkennziffer Beschleunigung Gesamtfederwert Rinne 1.5 m Max. Distanz der Lenker L max 6 Anzahl Lenker z 368 N Belastung pro Lenker G 12× AU 27 Wahl Schwingelement z. B. Auswahl ROSTA-Elemente: AU, AR, AS-P, AS-C 200 mm Achsabstand Schwingelemente A Beschleunigungskraft Wahl Schubstangenkopf Antriebsleistung ca. Dynamisches Drehmoment Dynam....
Katalog auf Seite 2 öffnen
Technologie 3. Einmassensystem geführt: Einbaurichtlinien Anstellwinkel β: Der Anstellwinkel β der Lenker ist je nach Prozess und Fördergeschwindigkeit zwischen 10° und 30° zur Vertikalen zu wählen. (Die optimale Kombination der schnellen Förderung und dem hohen Materialwurf ist beim Anstellwinkel β = 30° gegeben.) Die Schubstangen-Wirkrichtung 90° dazu anordnen, das heisst der Schubkraft-Anstellwinkel β liegt dementsprechend zwischen 10° und 30° zur Horizontalen. Schraubenqualität: Schraubenqualität 8.8 wählen und mit korrektem Anziehmoment montieren. Position ST-Kopf: Beim Einmassensystem folgende...
Katalog auf Seite 3 öffnen
Technologie 5. Maximale Belastung G, Drehzahl ns und Schwingwinkel α Nenngrösse (z.B. AU 15) Der Schwingwinkel a von jeder Komponente muss im zulässigen Einsatzbereich (ns und a) liegen, d.h. Lenker, Schubstange und Federspeicher. Berechnung Schwingwinkel Lenker Exzenterradius R [mm] Achsabstand A [mm] Schwingwinkel a ± [°] (gilt für kleine Winkel) Belastung für höhere Maschinenkennziffern und Elemente für höhere Belastungen auf Anfrage. Üblich sind Drehzahlen ns = 300–600 min-1 und Schwingwinkel a bis max. ±6°. * Grundlage: «Frequenzband» im Technologie-Teil der ROSTA-Gesamtdokumentation. 6....
Katalog auf Seite 4 öffnen
AD-P 18 AD-PV 18 AD-P 27 AD-PV 27 AD-P 38 AD-PV 38 AD-P 45 AD-PV 45 AD-P 50 AD-PV 50 Stahl geschweisst, blau schutzlackiert. Innenteile analog Typ AU. Stahl geschweisst, Leichtmetallprofil, blau schutzlackiert. G = max. Belastung in N pro Schwinge, für andere K siehe Punkt 5 auf Seite 2.24. cd = dynamischer Federwert bei Schwingwinkel α + 5° im Drehzahlbereich ns = 300–600 min –1 www.rosta.com Weitere Grundlagen und Berechnungen auf den Seiten 2.22–2.24. 2.27 Typ AD-PV mit versetzten Flanschen
Katalog auf Seite 5 öffnenAlle Kataloge und technischen Broschüren von ROSTA
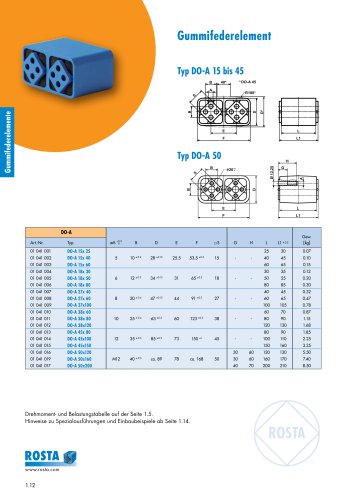 Gummifederelement Typ DO-A
Gummifederelement Typ DO-A4 Seiten
 Gummifederelement Typ DK-A
Gummifederelement Typ DK-A4 Seiten
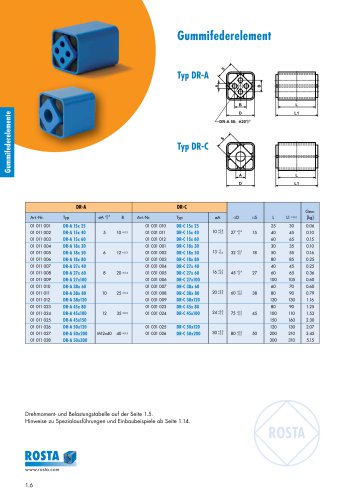 Gummifederelement Typ DR-A
Gummifederelement Typ DR-A4 Seiten
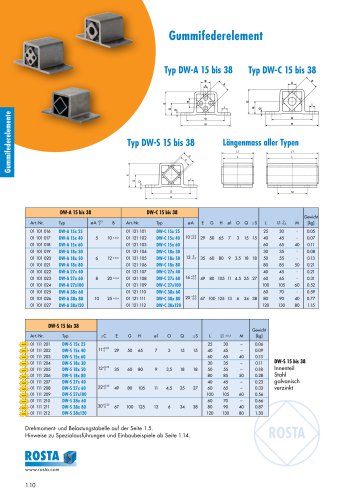 Gummifederelement Typ DW-A 15-38
Gummifederelement Typ DW-A 15-385 Seiten
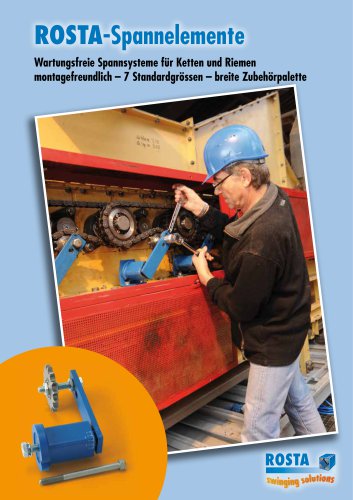
 Produktegruppe Spannelemente
Produktegruppe Spannelemente16 Seiten
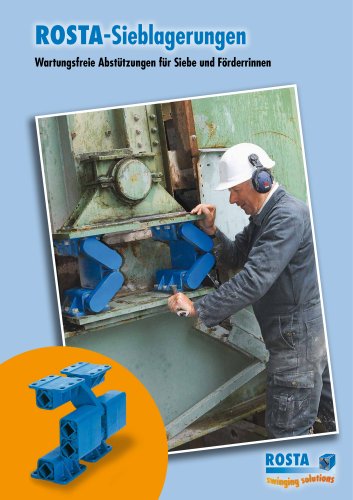
 Sieblagerungen
Sieblagerungen20 Seiten
 Produktegruppe Schwingelemente
Produktegruppe Schwingelemente40 Seiten
 Produktegruppe Schwingungsdämpfer
Produktegruppe Schwingungsdämpfer16 Seiten
 Produktegruppe Gummifederelemente
Produktegruppe Gummifederelemente20 Seiten
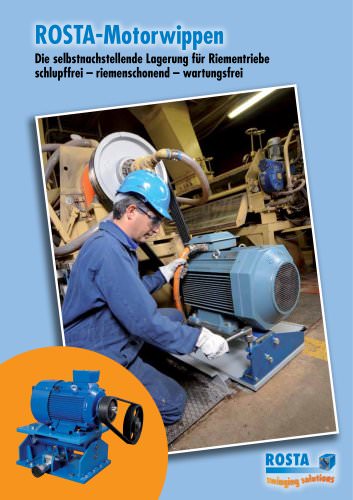
 Produktegruppe Motorwippen
Produktegruppe Motorwippen16 Seiten
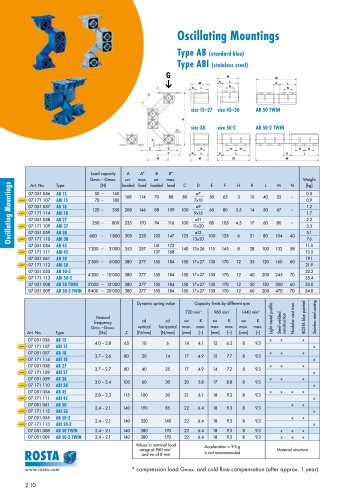
 Schwingelement Typ AB-HD
Schwingelement Typ AB-HD5 Seiten
 ROSTA Technologie-Teil
ROSTA Technologie-Teil11 Seiten
 Schwingungsdämpfer
Schwingungsdämpfer16 Seiten
 SPANNELEMENTE
SPANNELEMENTE16 Seiten
 MOTORWIPPEN
MOTORWIPPEN16 Seiten
 SIEBLAGERUNGEN
SIEBLAGERUNGEN20 Seiten
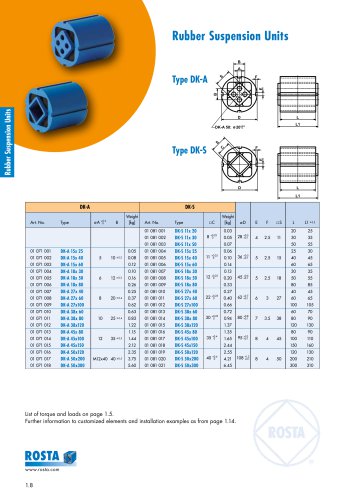 DK-S
DK-S4 Seiten
 DR-C
DR-C4 Seiten
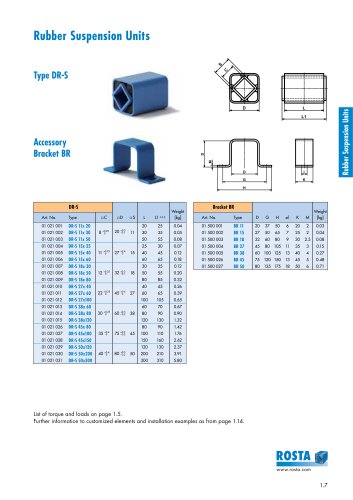 Product Info Type DR-S
Product Info Type DR-S4 Seiten
 Green Technology
Green Technology12 Seiten
 New Motorbase ATEX
New Motorbase ATEX8 Seiten
 Type AB TWIN
Type AB TWIN7 Seiten
- Maschinenfuß
- Elastische Lagerung
- ERLO Metallhalterung
- Nivellierfuß
- Metallfuß
- Elastische Lagerung / Metall
- Befestigungslasche
- Antivibrationsfuß
- Edelstahlfuß
- Spanner
- Metall-Befestigungswinkel
- Elastische Lagerung / Stahl
- Rechteckige elastische Lagerung
- Rutschfeste Fuß
- Hängeelement
- Stahl-Befestigungswinkel
- Motorhalterung
- Elastische Lagerung / niederfrequente
- Federnder Spanner
- Spanner / Ketten und Riemen