LEJS100-X400 series
1 /15Seiten

LEJS100-X400 series
1 /15Seiten
Katalogauszüge

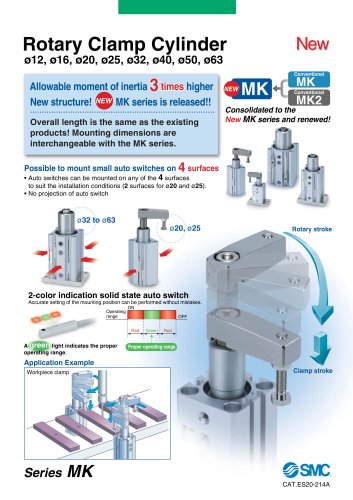
Ausführung mit hoher Steifigkeit und Kugelumlaufführung Elektrischer Antrieb Ȝ Unterstützt ∗1 Geschwindigkeit: 500 mm/s, Steigung: 10 mm ∗2 Hub: 500 mm, Steigung: 50 mm Motorlose Ausführung Ȝ Max. Beschleunigung / Verzögerung: AC-Servomotor Impulseingang-Ausführung / Positionierausführung Serie LECSB-T ¡Positionierung mit bis zu 255 Punkten ¡Eingangstyp: Impulseingang (Sink-Schnittstelle (NPN) / Source-Schnittstelle (PNP)) ¡Absolut-Encoder: Absolut-Encoder 22-bit (Auflösung: 4.194.304 Pulse/Umdrehung) ¡Sicherheitsfunktion STO (Safe Torque Off-sicher abgeschaltetes Moment) ¡Paralleleingang : 10 Eingänge ¡Parallelausgang: 6 Ausgänge Motorlose Ausführung Kompatible Motoren nach Hersteller Kompatible Schnittstellen Hersteller Mitsubishi Electric Corporation YASKAWA Electric Corporation SGM7J-08 Handelsmarke: DeviceNet™ i t eine H d l D i N t™ ist i Handelsmarke von O
Katalog auf Seite 1 öffnen
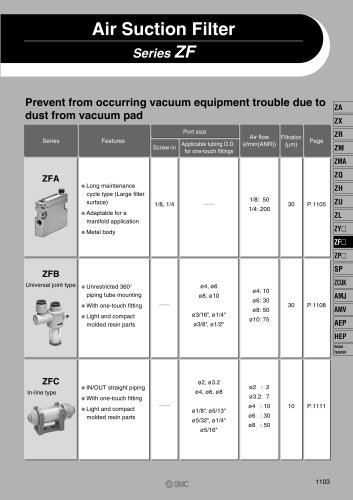
Motorlose Ausführung System-Aufbau Kompatibel mit Absolut-Encoder Serie bSpannungsversorgungsstecker Hauptschaltkreis bAnalogausgang Option externer Bremswiderstand Teilenummer: LEC-MR-RB-२ bSpannungsversorgungsstecker Regelelektronik Vom Kunden bereitzustellen Spannungsversorgung für Elektrischer Antrieb Motorbremse Serie LEJ 24 VDC LE-CSNB oder I/O-Kabel Web-Katalog LEC-CSNB-1 Vom Kunden bereitzustellen bEncoderkabel ∗ LECSB2-T२ ˿ĢǢǢ kann nicht mit LEC-MR-SETUP221२ verwendet werden. Batterie (Zubehör) (LEC-MR-BAT6V1SET) Web-Katalog
Katalog auf Seite 2 öffnen
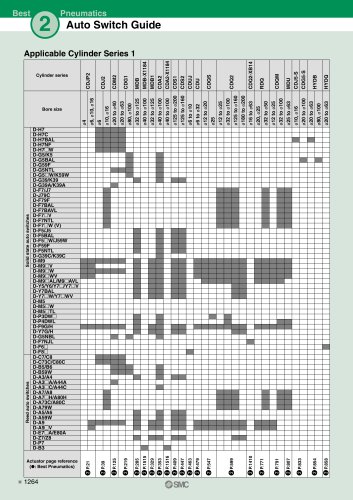
Elektrischer Antrieb / Ausführung mit hoher Steifigkeit und Kugelumlaufführung Typenauswahl AC-Servomotor Geschwindigkeits-Nutzlast-Diagramm/Bedingungen für externen Bremswiderstand Horizontal Bereich, in dem der externe Bremswiderstand erforderlich ist Bereich, in dem der externe Bremswiderstand erforderlich ist Bedingungen für den externen Bremswiderstand ∗ Der externe Bremswiderstand ist erforderlich, wenn sich der Betrieb des Produktes im Bereich (A, B, C, oder D) befindet. (Getrennt zu bestellen) Ausführungen für den externen Bremswiderstand Betriebsbedingung Bedingungen für den externen Bremswiderstand...
Katalog auf Seite 3 öffnen
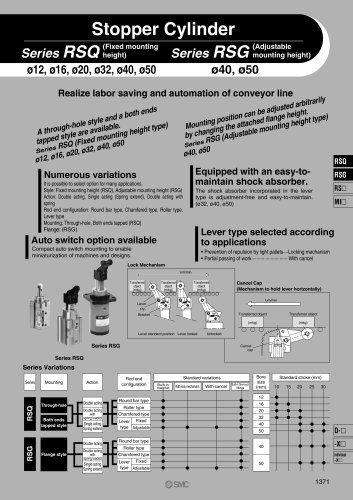
LEJS100-X400 Motorlose Ausführung ∗ Diese Diagramme zeigen den zulässigen Überhang, wenn der Lastschwerpunkt des Werkstücks einen Überhang in eine Richtung aufweist. Beachten Sie bei dre Auswahl zum Überhang die "Berechnung des Belastungsgrades der Führung". Werte bis 5000 mm/s2 entsprechen dem Wert 5000 mm/s2 Y m 100 200 300 400 Nutzlast [kg] Werte bis 5000 mm/s2 entsprechen dem Wert 5000 mm/s2 m: Nutzlast [kg] Me: Zulässiges dynamisches Moment [Nm] L: Überhang zum Schwerpunkt der Nutzlast [mm] Werte bis 5000 mm/s2 entsprechen dem Wert 5000 mm/s2 m: Nutzlast [kg] Me: Zulässiges dynamisches Moment...
Katalog auf Seite 4 öffnen
Motorlose Ausführung Berechnung des Belastungsgrads der Führung 1. Bestimmen Sie die Betriebsbedingungen. Beschleunigung [mm/s2]: a Modell: LEJS-X400 Nutzlast [kg]: m Größe: 100 Nutzlast-Mitte [mm]: Xc/Yc/Zc Einbaurichtung: Horizontal/Decke/Wand/Vertikal 2. Wählen Sie das Ziel-Diagramm unter Berücksichtigung des Modells, der Größe und Einbaulage aus. 3. Ermitteln Sie den Überhang basierend auf der Beschleunigung und Nutzlast [mm]: Lx/Ly/Lz des folgenden Diagramms. 4. Berechnen Sie den Lastfaktor für jede Richtung. αx = Xc/Lx αy = Yc/Ly αz = Zc/Lz 5. Bestätigen Sie, dass der Gesamtwert von αx,...
Katalog auf Seite 5 öffnen
Elektrischer Antrieb / Ausführung mit hoher Steifigkeit und Kugelumlaufführung Kugelumlaufspindelantrieb LEJS100-X400 Bestellschlüssel Motorausführung: AC-Servomotor (Absolut-Encoder) 750 W ohne Kabel Standardkabel Robotikkabel (flexibles Kabel) ohne Option mit Motorbremse 5 ∗1 Bei Wahl der Endstufenart ist ein Kabel inbegriffen. 10 Kabelausführung und -länge auswählen. ∗3 Wenn „ohne Endstufe“ als Ausführung gewählt Beispiel) wird, kann nur „—: ohne Kabel“ ausgewählt werden. S2B2 : Standardkabel (2 m) + Endstufe (LECSB2) S2 : Standardkabel (2 m) — : ohne Kabel und Endstufe Länge I/O-Kabel [m]∗4...
Katalog auf Seite 6 öffnen
Elektrischer Antrieb / Ausführung mit hoher Steifigkeit und Kugelumlaufführung Kugelumlaufspindelantrieb Technische Daten Elektrische Spezifikationen der Motorbremse Spezifikationen technische Daten Antrieb Funktionsweise Führungsart Statisch zulässiges Mep (Längsbelastung) Drehmoment∗6 Mey (Querbelastung) [Nm] Mer (Seitenbelastung) Betriebstemperaturbereich [°C] Luftfeuchtigkeitsbereich [%RH] Option Regenerierung Motorleistung [W]/Größe [mm] Motorausführung Absoluter 22-Bit-Encoder (Auflösung: 4194304 Impulse/Umdrehung) Encoderausführung Leistung [W]∗7 Ausführung∗8 Haltekraft [N] Leistungsaufnahme...
Katalog auf Seite 7 öffnen
Beschreibung Gehäuse Kugelumlaufspindel Linearführung Schlitten seitliche Abdeckung Staubschutzband Gehäuseplatte M Gehäuseplatte E Motorflansch Distanzstück Kupplung Motor Lager Lager Stift Stift Kappe Magnet Kontermutter Schmierfett Material Aluminiumlegierung — — Aluminiumlegierung Aluminiumlegierung Aluminiumlegierung Aluminiumlegierung Aluminiumlegierung Aluminiumlegierung Aluminiumlegierung — — — — Kohlenstoffstahl Kohlenstoffstahl Polyäthylen — — eloxiert eloxiert eloxiert eloxiert eloxiert eloxiert nur „Steigung: H“ Bereich Kugelumlaufspindel Linearführung
Katalog auf Seite 8 öffnen
Elektrischer Antrieb / Ausführung mit hoher Steifigkeit und Kugelumlaufführung Kugelumlaufspindelantrieb Abmessungen: Kugelumlaufspindelantrieb Encoder Erfassungsposition Z-Phase ∗1 Bei der Montage des Antriebs unter Verwendung der Bezugsebene für die Gehäusemontage sollte die Höhe der gegenüberliegenden Fläche oder des Stifts mindestens 5 mm betragen. (Empfehlung Höhe 6 mm) Die Oberflächen der Platten M und E an den Enden des Produkts können geringfügig über die Bezugsebene der Gehäusebefestigung hinausragen (Gehäuse/Abmessungsbereich B). Stellen Sie sicher, dass Sie einen Abstand von mindestens...
Katalog auf Seite 9 öffnenAlle Kataloge und technischen Broschüren von SMC
 Inline-Vakuumerzeuger
Inline-Vakuumerzeuger6 Seiten
 Serie HRR
Serie HRR65 Seiten
 Série VP/VG
Série VP/VG33 Seiten
 Série XL
Série XL27 Seiten
 Série ACG/ARG/AWG
Série ACG/ARG/AWG45 Seiten
 Série JXC5H/6H
Série JXC5H/6H36 Seiten
 JMB series
JMB series13 Seiten
 JCM series
JCM series21 Seiten
 PF3A7*H
PF3A7*H40 Seiten
 PF3W
PF3W34 Seiten
 Serie ZR
Serie ZR46 Seiten
 ISO-Zylinder
ISO-Zylinder32 Seiten
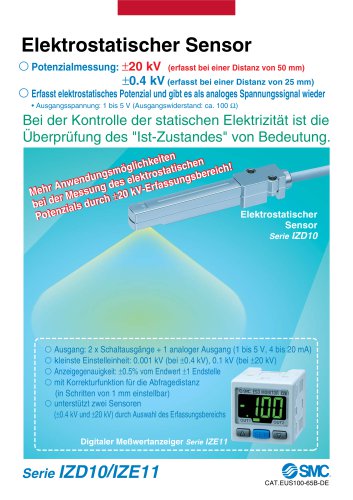 IZD10
IZD1020 Seiten
 IZH10
IZH108 Seiten
 IDH-A
IDH-A12 Seiten
 CP96-C96-B
CP96-C96-B73 Seiten
 CVQ
CVQ24 Seiten
 HY
HY52 Seiten
 VNA
VNA10 Seiten
 Serie MXY
Serie MXY28 Seiten
 Serie MXP
Serie MXP39 Seiten
 Pneumatischer Kompaktschlitten
Pneumatischer Kompaktschlitten132 Seiten
 Kompaktzylinder Serie CQ2
Kompaktzylinder Serie CQ2138 Seiten
 S0700
S0700108 Seiten
 SYJ
SYJ96 Seiten
 SY - NEW
SY - NEW164 Seiten
 VF
VF60 Seiten
 C(D)55 series
C(D)55 series24 Seiten
 C(D)Q2 series
C(D)Q2 series216 Seiten
 MGP series
MGP series36 Seiten
 11-LEFS series
11-LEFS series20 Seiten
 LECS series
LECS series16 Seiten
 LECPA series
LECPA series4 Seiten
 Compact Guide Cylinder with Lock
Compact Guide Cylinder with Lock36 Seiten
 Water Treatment
Water Treatment16 Seiten
 Food & Packaging Industry
Food & Packaging Industry4 Seiten
 Digital Gap Checker
Digital Gap Checker26 Seiten
 Vacuum Pad
Vacuum Pad16 Seiten
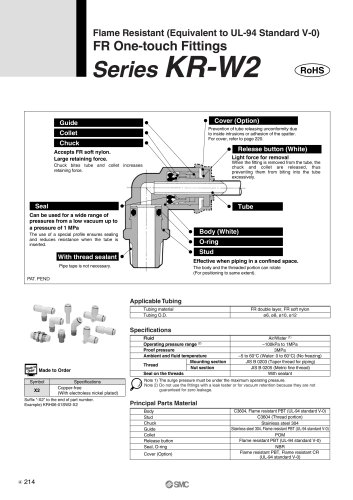
 One-touch Fittings
One-touch Fittings224 Seiten
 Soft Start-up Valve
Soft Start-up Valve16 Seiten
 Electric Actuator
Electric Actuator272 Seiten
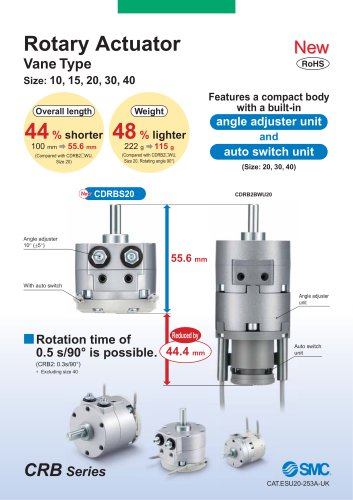
 Rotary Actuator
Rotary Actuator40 Seiten
 Compact Guide Cylinder
Compact Guide Cylinder18 Seiten
 Compact Slide
Compact Slide24 Seiten
 Air Cylinder
Air Cylinder124 Seiten
 LEFB, LEFG-BS series
LEFB, LEFG-BS series180 Seiten
 JMGP series
JMGP series16 Seiten
 Fan Type Lonizer
Fan Type Lonizer28 Seiten
 Check Valves
Check Valves4 Seiten
 Compact Cylinder/Clean series
Compact Cylinder/Clean series16 Seiten
 3 port solenoid Valve
3 port solenoid Valve74 Seiten
 Vacuum Ejector Series ZM
Vacuum Ejector Series ZM20 Seiten
 Series ZL
Series ZL20 Seiten
 Series CM2
Series CM292 Seiten
 Series IDGA/IDG
Series IDGA/IDG56 Seiten
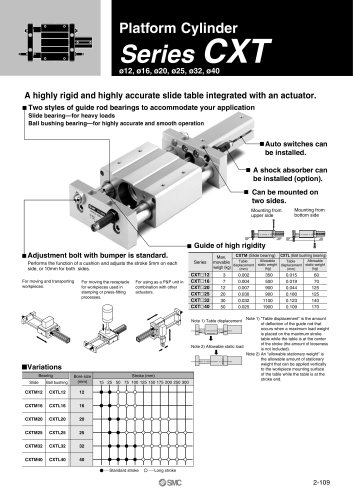 Platform Cylinder Series CXT
Platform Cylinder Series CXT14 Seiten
 KQ series
KQ series80 Seiten
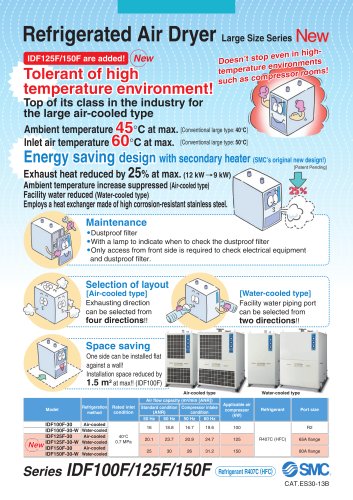 IDF series
IDF series16 Seiten
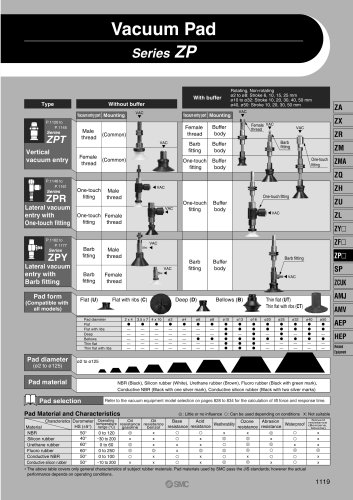 ZP series
ZP series69 Seiten
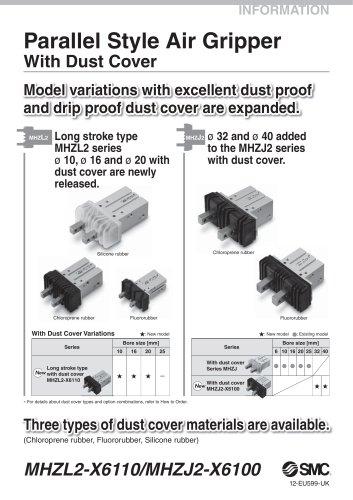
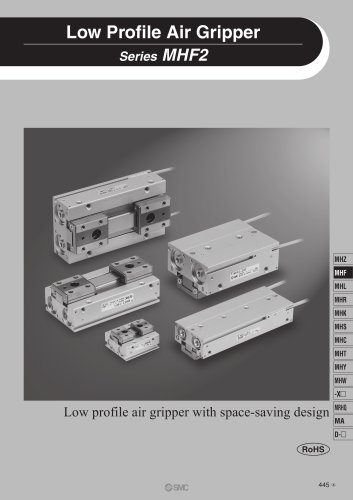 MHF series
MHF series32 Seiten
 MHZ series
MHZ series68 Seiten
 CRB series
CRB series44 Seiten
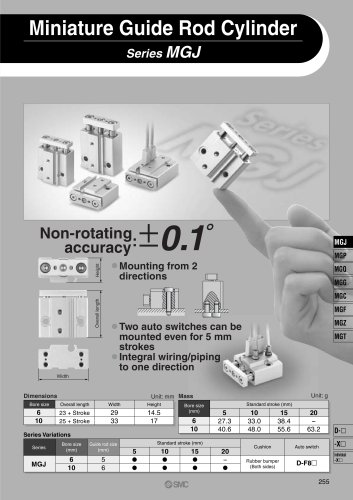 MGJ series
MGJ series7 Seiten
 AC series
AC series98 Seiten
 VH series
VH series14 Seiten
 LVA series
LVA series43 Seiten
 VDW series
VDW series28 Seiten
 LVM series
LVM series28 Seiten
 VX2 series
VX2 series32 Seiten
 MXH series
MXH series32 Seiten
 MXF series
MXF series12 Seiten
 CXW series
CXW series48 Seiten
 CXS series
CXS series76 Seiten
 CQS series
CQS series40 Seiten
 CQM series
CQM series28 Seiten
 CLQ series
CLQ series36 Seiten