Série JXC5H/6H
1 /36Seiten

Série JXC5H/6H
1 /36Seiten
Katalogauszüge

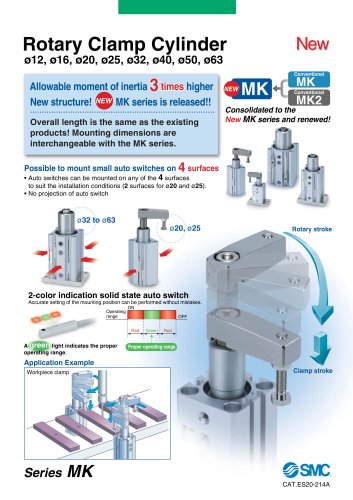
High Performance Elektrischer Antrieb Reduzierte Zykluszeit, höhere Taktrate Zykluszeit ∗1 Wenn LEFS25FH-400 über den gesamten Hub verfahren wird. Beschleunigung/ Verzögerung % höher im Vergleich zur bestehenden Serie) % schneller im Vergleich zur bestehenden Serie) Bestehende Serie Schrittmotor-Controller Ermöglicht die Einstellung einer hohen Beschleunigung und der maximalen Geschwindigkeit
Katalog auf Seite 1 öffnen
Elektrischer Spindelantrieb Serie LEFS २F High Performance Modellauswahl Auswahlverfahren Schritt 1 Überprüfen Sie das Verhältnis Nutzlast–Geschwindigkeit. Überprüfen Sie das zulässige Moment. țEinbaulage: Horizontal Schritt 1 Überprüfen Sie das Verhältnis Nutzlast–Geschwindigkeit. (Seiten 2 bis 5) Wählen Sie das Modell entsprechend dem Werkstückgewicht und Geschwindigkeit unter Berücksichtigung des Geschwindigkeits-/Nutzlast-Diagramms. Auswahlbeispiel) LEFS25FA-200 wird basierend auf dem Diagramm rechts vorläufig ausgewählt. Schritt 2 Überprüfen Sie die Zykluszeit. T = T1 + T2 + T3 + T4 [s] țT1:...
Katalog auf Seite 2 öffnen
Modellauswahl Serie High Performance Geschwindigkeits-Nutzlast-Diagramm (Führung) ∗ Die folgenden Diagramme zeigen die Werte bei einer Bewegungskraft (Moving Force) von 100 %.
Katalog auf Seite 3 öffnen
Serie LEFS२F High Performance Geschwindigkeits-Nutzlast-Diagramm (Führung) ∗ Die folgenden Diagramme zeigen die Werte bei einer Bewegungskraft (Moving Force) von 100 %.
Katalog auf Seite 4 öffnen
Modellauswahl Serie High Performance Geschwindigkeits-Nutzlast-Diagramm (Führung) ∗ Die folgenden Diagramme zeigen die Werte bei einer Bewegungskraft (Moving Force) von 100 %.
Katalog auf Seite 5 öffnen
Serie LEFS२F High Performance Geschwindigkeits-Nutzlast-Diagramm (Führung) ∗ Die folgenden Diagramme zeigen die Werte bei einer Bewegungskraft (Moving Force) von 100 %.
Katalog auf Seite 6 öffnen
Modellauswahl Serie High Performance Zulässiges dynamisches Moment ∗ Diese Diagramme zeigen den zulässigen Überhang, wenn der Lastschwerpunkt des Werkstücks einen Überhang in eine Richtung aufweist. Beschleunigung Einbaulage m: Nutzlast [kg] Me: Zulässiges dynamisches Moment [N·m] L: Überhang zum Lastmittelpunkt der Nutzlast [mm] Horizontal / Bodenmontage
Katalog auf Seite 7 öffnen
Serie LEFS२F High Performance Zulässiges dynamisches Moment ∗ Diese Diagramme zeigen den zulässigen Überhang, wenn der Lastschwerpunkt des Werkstücks einen Überhang in eine Richtung aufweist. m : Nutzlast [kg] Me: Zulässiges dynamisches Moment [N·m] L: Überhang zum Schwerpunkt der Nutzlast [mm] Berechnung des Belastungsgrads der Führung 1. Bestimmen Sie die Betriebsbedingungen. Beschleunigung [mm/s2]: a Modell: LEFS२F Nutzlast [kg]: m Baugröße: 25/32/40 Nutzlast-Mitte [mm]: Xc/Yc/Zc Einbaulage: Horizontal/Boden/Wand/Vertikal 2. Wählen Sie das Ziel-Diagramm unter Berücksichtigung des Modells,...
Katalog auf Seite 8 öffnen
Modellauswahl Serie High Performance Schlittengenauigkeit (Referenzwert) A-Seite lineare Verfahrgenauigkeit [mm] (alle 300 mm) Modell q C-Seite zur A-Seite q D-Seite zur B-Seite ∗ Die lineare Verfahrgenauigkeit schließt nicht die Genauigkeit der Montagefläche ein. (gültig bis zu einem Hub von 2000 mm) Last W [N] ∗ Diese Abweichung wird gemessen, wenn eine Aluminiumplatte von 15 mm auf dem Schlitten montiert und befestigt wird. ∗ Überprüfen Sie das Schlittenspiel in Verbindung mit der Schlittenabweichung und der Abweichung bei Überhang separat. Abweichung bei Überhang durch Spiel des Schlittens...
Katalog auf Seite 9 öffnen
High Performance Elektrischer Spindelantrieb LEFS२F Serie LEFS16, 25, 32, 40 Bestellschlüssel !2 Weitere Einzelheiten zu den Controllern finden Sie auf Seite 24. Grundausführung Präzisionsausführung High Performance (Schrittmotor 24 VDC) i Signalgebermontage∗2 ∗3 ∗4 ∗5 ohne vorhanden (inkl. 1 Befestigungselement) ohne Option mit Motorbremse Standard laufrollengeführt (fettfrei) Verwendbare Größe Unterseite / Gehäuseseite B∗ 6 Gehäuseunterseite 2 Bohrungen
Katalog auf Seite 10 öffnen
High Performance Elektrischer Spindelantrieb Serie ohne Controller mit Controller C6H7 3 Länge I/O-Kabel Controller-Ausführung 5 Parallele I/O (NPN) Ausführung 6 Parallele I/O (PNP) Ausführung Schraubmontage DIN-Schiene ∗1 Setzen Sie für für Hübe, die nicht Standard sind, mit SMC in Verbindung. ∗2 Ausgenommen LEFS16 ∗3 Falls 2 oder mehr Befestigungselemente erforderlich sind, diese bitte separat bestellen. (Teilenummer: LEF-D-2-1 Siehe Web-Katalog für Details.) ∗4 Signalgeber separat bestellen. (Siehe Web-Katalog für Details.) ∗5 Bei der Wahl von „—“ wird das Produkt ohne eingebauten Magneten...
Katalog auf Seite 11 öffnen
Serie LEFS२F Technische Daten des Antriebs max. Beschleunigung/ Horizontal Verzögerung [mm/s2] Vertikal Technische Daten Motorbremse Luftfeuchtigkeitsbereich [%RH] Elektrische Spezifikationen Motorausführung Encoder Inkremental, A/B-Phase (800 Impulse/Umdrehung) 24 VDC ±10 % Nennspannung [V] Standby-Leistungsaufnahme im Betriebszustand [W]∗5 max. Leistungsaufnahme [W]∗6 Ausführung∗7 Haltekraft [N] Leistungsaufnahme [W]∗8 Nennspannung [V] ∗1 Bitte setzen Sie sich für Hübe, die nicht Standard sind, mit SMC in Verbindung, da diese als Sonderbestellung gefertigt werden. ∗2 Maximale Nutzlast bei einer...
Katalog auf Seite 12 öffnen
High Performance Elektrischer Spindelantrieb Serie Gewicht Serie Hub [mm] Produktgewicht [kg] Zusätzliches Gewicht für Motorbremse [kg] Serie Hub [mm] Produktgewicht [kg] Zusätzliches Gewicht für Motorbremse [kg] Serie Hub [mm] Zusätzliches Gewicht für Motorbremse [kg] Zusätzliches Gewicht für Motorbremse [kg]
Katalog auf Seite 13 öffnen
Serie LEFS२F Abmessungen: axialer Motor LEFS16F +0,025 M4 x 0,7 Gewinde Tiefe 7 (F.G.-Klemme) Bezugsebene für Gehäusemontage (Gehäuseseite B)∗1 ∗1 Wenn Sie den Antrieb unter Verwendung der Bezugsebene für Gehäusemontage montieren, sollte die Höhe der Bezugsebene bzw. der Stifte min. 2mm sein. (Empfohlene Höhe 5 mm) Beachten Sie außerdem, dass andere Oberflächen als die Bezugsebene für Gehäusemontage (Gehäuseseite B) über die Bezugsebene für Gehäusemontage hervorstehen können. Stellen Sie daher sicher, dass ein Abstand von min. 1mm vorhanden ist, um Beeinträchtigungen zwischen den Werkstücken,...
Katalog auf Seite 14 öffnenAlle Kataloge und technischen Broschüren von SMC
 Inline-Vakuumerzeuger
Inline-Vakuumerzeuger6 Seiten
 Serie HRR
Serie HRR65 Seiten
 Série VP/VG
Série VP/VG33 Seiten
 Série XL
Série XL27 Seiten
 Série ACG/ARG/AWG
Série ACG/ARG/AWG45 Seiten
 LEJS100-X400 series
LEJS100-X400 series15 Seiten
 JMB series
JMB series13 Seiten
 JCM series
JCM series21 Seiten
 PF3A7*H
PF3A7*H40 Seiten
 PF3W
PF3W34 Seiten
 Serie ZR
Serie ZR46 Seiten
 ISO-Zylinder
ISO-Zylinder32 Seiten
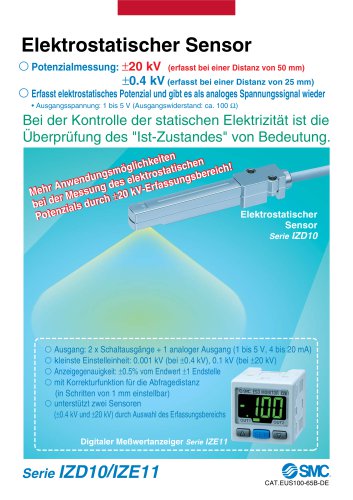 IZD10
IZD1020 Seiten
 IZH10
IZH108 Seiten
 IDH-A
IDH-A12 Seiten
 CP96-C96-B
CP96-C96-B73 Seiten
 CVQ
CVQ24 Seiten
 HY
HY52 Seiten
 VNA
VNA10 Seiten
 Serie MXY
Serie MXY28 Seiten
 Serie MXP
Serie MXP39 Seiten
 Pneumatischer Kompaktschlitten
Pneumatischer Kompaktschlitten132 Seiten
 Kompaktzylinder Serie CQ2
Kompaktzylinder Serie CQ2138 Seiten
 S0700
S0700108 Seiten
 SYJ
SYJ96 Seiten
 SY - NEW
SY - NEW164 Seiten
 VF
VF60 Seiten
 C(D)55 series
C(D)55 series24 Seiten
 C(D)Q2 series
C(D)Q2 series216 Seiten
 MGP series
MGP series36 Seiten
 11-LEFS series
11-LEFS series20 Seiten
 LECS series
LECS series16 Seiten
 LECPA series
LECPA series4 Seiten
 Compact Guide Cylinder with Lock
Compact Guide Cylinder with Lock36 Seiten
 Water Treatment
Water Treatment16 Seiten
 Food & Packaging Industry
Food & Packaging Industry4 Seiten
 Digital Gap Checker
Digital Gap Checker26 Seiten
 Vacuum Pad
Vacuum Pad16 Seiten
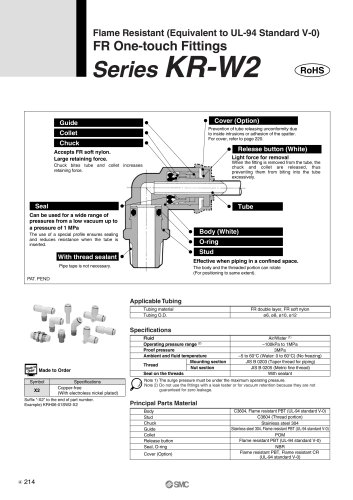
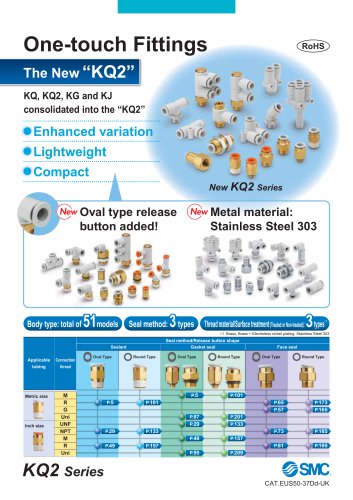 One-touch Fittings
One-touch Fittings224 Seiten
 Soft Start-up Valve
Soft Start-up Valve16 Seiten
 Electric Actuator
Electric Actuator272 Seiten
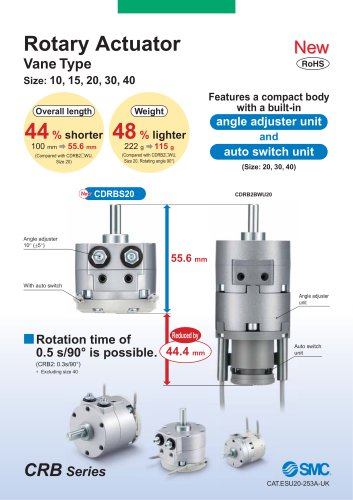
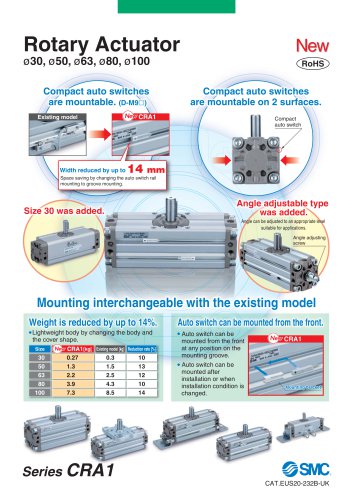 Rotary Actuator
Rotary Actuator40 Seiten
 Compact Guide Cylinder
Compact Guide Cylinder18 Seiten
 Compact Slide
Compact Slide24 Seiten
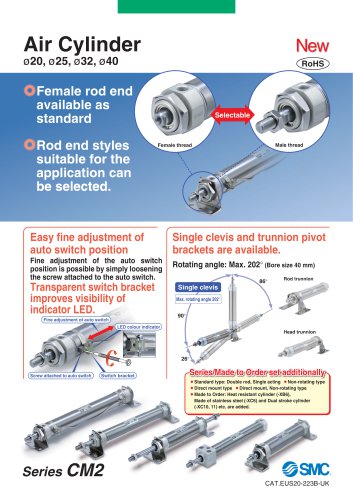
 Air Cylinder
Air Cylinder124 Seiten
 LEFB, LEFG-BS series
LEFB, LEFG-BS series180 Seiten
 JMGP series
JMGP series16 Seiten
 Fan Type Lonizer
Fan Type Lonizer28 Seiten
 Check Valves
Check Valves4 Seiten
 Compact Cylinder/Clean series
Compact Cylinder/Clean series16 Seiten
 3 port solenoid Valve
3 port solenoid Valve74 Seiten
 Vacuum Ejector Series ZM
Vacuum Ejector Series ZM20 Seiten
 Series ZL
Series ZL20 Seiten
 Series CM2
Series CM292 Seiten
 Series IDGA/IDG
Series IDGA/IDG56 Seiten
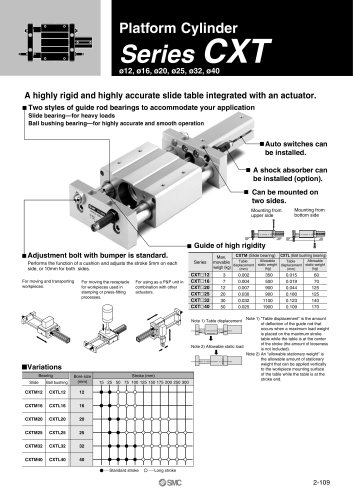 Platform Cylinder Series CXT
Platform Cylinder Series CXT14 Seiten
 KQ series
KQ series80 Seiten
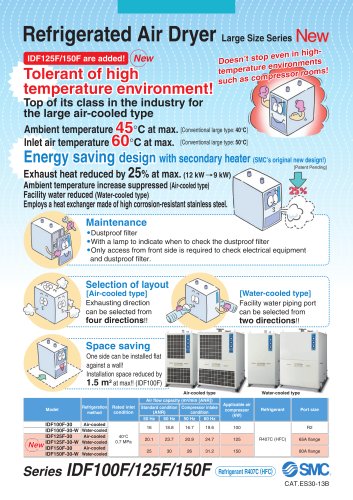 IDF series
IDF series16 Seiten
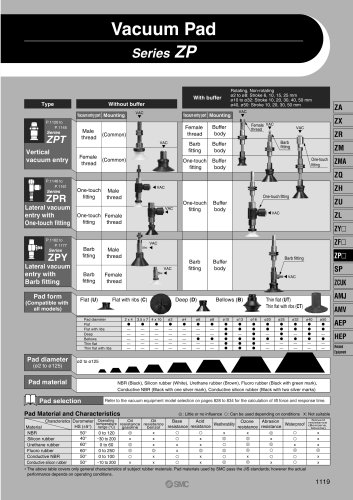 ZP series
ZP series69 Seiten
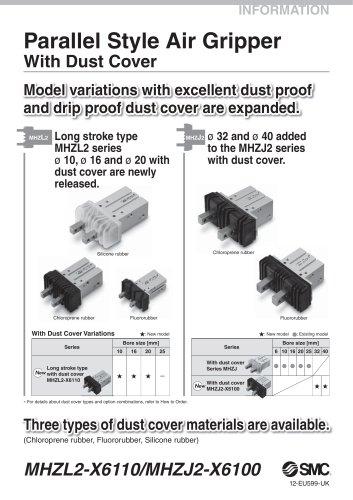
 MHF series
MHF series32 Seiten
 MHZ series
MHZ series68 Seiten
 CRB series
CRB series44 Seiten
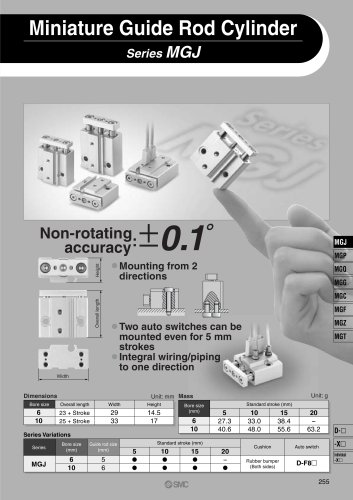 MGJ series
MGJ series7 Seiten
 AC series
AC series98 Seiten
 VH series
VH series14 Seiten
 LVA series
LVA series43 Seiten
 VDW series
VDW series28 Seiten
 LVM series
LVM series28 Seiten
 VX2 series
VX2 series32 Seiten
 MXH series
MXH series32 Seiten
 MXF series
MXF series12 Seiten
 CXW series
CXW series48 Seiten
 CXS series
CXS series76 Seiten
 CQS series
CQS series40 Seiten
 CQM series
CQM series28 Seiten
 CLQ series
CLQ series36 Seiten